3.非線形解析法
3-1 破壊条件
構造物や地盤などの崩壊解析を行う際に問題となるのが破壊基準の考え方である.最近では実験技術の進歩に伴い,理論的な破壊基準以外にも実験式的な基準が数多く提案されている.これらの基準をすべて数値解析に取り入れることができるかというと,アルゴリズムとの適合性などから必ずしもそうでないモデルもあるようである.本書ではRBSMによる離散化極限解析に破壊条件をどのように取り込むかを主に説明するため,代表的な二三の破壊条件を示し,それらに対してどのように構成式を誘導するかを説明する.基本的には最近発表されている多くの破壊基準式に対しても同様な手法により導入することが可能である.RBSMではFEMのように要素内応力ではなく,要素境界辺上における垂直方向及びせん断方向に関する2つの単位面積当りの表面力を取り扱う.したがって,破壊条件としては合力で与えられる式を直接利用する.すなわち,FEMではテンソル量としての応力から主応力などを利用して破壊条件式を考えるのに対し,RBSMではベクトル量としての合力によって破壊条件を表す.この点さえ注意を行えば,その後の展開はFEMにおける取り扱いと大差ない.
以下に本書で取り扱う破壊条件式を整理しておき,詳細についての説明は専門書に譲る.
$\hspace{3em}$
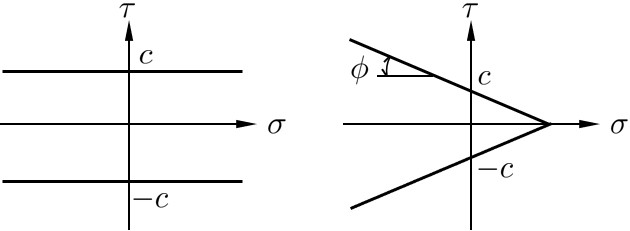
クーロンの条件は
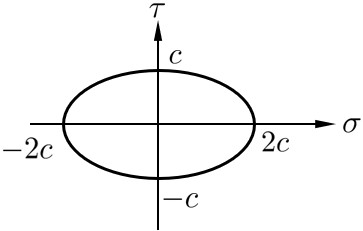
次に,平面応力状態の代表的な降伏条件として以下のようなミーゼスの条件を示す. \[{\rm (3.3)} \left. \begin{array}{l} \displaystyle \tau^2 + \frac{1}{4} \sigma^2 = C^2 \\[1em] \displaystyle f = \tau^2 + \frac{1}{4}\sigma^2 - C^2 \end{array} \right\} \] ここに,$C$ はせん断降伏応力である.
なお,本書では面内変形平面問題を対象としているため,3次元問題や軸対称問題,梁要素に関する降伏条件については省略する.
3-2 構成方程式
RBSMで取り扱う垂直及びせん断に関する表面力は2種類のばねを通して各要素に伝わる.一旦,このばねの受け持つ力が前節で示した降伏条件に達するとすべりなどの破壊が発生し,その後,破壊条件を満足しながら表面力が増加,減少する.本節ではこのような現象を表現するための構成式について説明する.塑性理論においては,降伏面を応力空間の表面として定義する前者の降伏面は弾性ひずみが生ずる応力状態と弾性ひずみと塑性ひずみの両者が混在する応力状態の境界に存在し,一般に \[{\rm (3.4)} f( \boldsymbol{\sigma} , \boldsymbol{\varepsilon}^p ) = 0 \] と表される.
一方,後者の塑性ポテンシャルは,その勾配によってひずみ増分の方向を定義しており,一般には \[{\rm (3.5)} Q( \boldsymbol{\sigma} )= 0 \] と書き表せる.通常,降伏関数と塑性ポテンシャルが等しいとする
また,弾性状態の量を上付きの $(e)$ で表せば,ひずみは \[{\rm (3.9)} \Delta \boldsymbol{\varepsilon}^{(e)} = \Delta \boldsymbol{\varepsilon} - \Delta \boldsymbol{\varepsilon}^{(p)} \] と表せる.ここで,$\boldsymbol{\varepsilon}$ は全ひずみを示している.
一方,弾性時における応力とひずみの間には次の関係が成立している. \[{\rm (3.10)} \boldsymbol{\sigma} = \boldsymbol{D}^{(e)} \cdot \boldsymbol{\varepsilon}^{(e)} \] したがって,
塑性解析では
以下にそれぞれの破壊条件を用いた場合の構成式を誘導する.
降伏関数 $\hspace{4em}$ $ f = \tau^2 - C^2$
降伏条件 $\hspace{4em}$ $ f = 0$
塑性流れ則 $\hspace{3em}$ $ \Delta \varepsilon_n^{(p)} = \lambda \frac{\displaystyle \partial f}{\displaystyle \partial \sigma_n} $ $\hspace{2em}$ $ \Delta \gamma^{(p)} = \lambda \frac{\displaystyle \partial f}{\displaystyle \partial \tau} $
ひずみ増分 $\hspace{3em}$ $ \Delta \varepsilon_n^{(e)} = \Delta \varepsilon_n - \Delta \varepsilon_n^{(p)} $
$\hspace{10em}$ $ \Delta \gamma^{(e)} = \Delta \gamma - \Delta \gamma^{(p)} $
応力-ひずみ関係(力-相対変位関係) \[\hspace{8em} \left\{ \begin{array}{c} \Delta \sigma_n \\ \Delta \tau \end{array} \right\} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \left\{ \begin{array}{c} \Delta \varepsilon_n^{(e)} \\ \Delta \gamma^{(e)} \end{array} \right\} \] 塑性条件 $\hspace{4em}$ $ \frac{\displaystyle \partial f}{\displaystyle \partial \sigma_n} \cdot \Delta \sigma_n + \frac{\displaystyle \partial f}{\displaystyle \partial \tau} \cdot \Delta \tau = 0 $ 以上を整理すると,$\lambda$ が以下のように計算される. \[\hspace{2em} \lambda = \frac{\Delta \gamma}{2 \tau} \] したがって,塑性化後の構成式は以下のようになる. \[{\rm (3.16)} \Delta \boldsymbol{\sigma} = \boldsymbol{D}^{(p)} \cdot \Delta \boldsymbol{\varepsilon} \] \[\hspace{6em} \boldsymbol{D}^{(p)} = \boldsymbol{D}^{(e)} - \boldsymbol{S} \] \[\hspace{6em} \boldsymbol{D}^{(e)} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \hspace{2em} \boldsymbol{S} = \left[ \begin{array}{cc} 0 & 0 \\ 0 & E_2 \end{array} \right] \]
降伏関数 $\hspace{4em}$ $ f=\tau^2 - (C-\tan \phi \cdot \sigma_n)^2 $
降伏条件 $\hspace{4em}$ $ f=0 $
塑性流れ則 $\hspace{3em}$ $ \Delta \varepsilon_n^{(p)} = \lambda \displaystyle \frac{\partial f}{\partial \sigma_n} $ $\hspace{2em}$ $ \Delta \gamma^{(p)} = \lambda \displaystyle \frac{\partial f}{\partial \tau} $
ひずみ増分 $\hspace{3em}$ $ \Delta \varepsilon_n^{(e)} = \Delta \varepsilon_n - \Delta \varepsilon_n^{(p)} $
$\hspace{10em}$ $ \Delta \gamma^{(e)}=\Delta \gamma - \Delta \gamma^{(p)} $
応力-ひずみ関係(力-相対変位関係) \[\hspace{8em} \left\{ \begin{array}{c} \Delta \sigma_n \\ \Delta \tau \end{array} \right\} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \left\{ \begin{array}{c} \Delta \varepsilon_n^{(e)} \\ \Delta \gamma^{(e)} \end{array} \right\} \] 塑性条件 $\hspace{4em}$ $ \displaystyle \frac{\partial f}{\partial \sigma_n} \cdot \Delta \sigma_n + \frac{\partial f}{\partial \tau} \cdot \Delta \tau = 0 $ 以上を整理すると,$\lambda$ が以下のように計算される. \[\hspace{2em} \lambda = \frac{1}{F} \left\{ E_2 \cdot \tau \cdot \Delta \gamma + E_1 ( c - \tan \phi \cdot \sigma_n) \tan \phi \cdot \Delta \varepsilon_n \right\} \] \[\hspace{4em} F = E_2 \cdot \tau^2 + E_1 \left\{ (c-\tan \phi \cdot \sigma_n) \tan \phi \right\}^2 \] したがって,塑性化後の構成式は以下のようになる. \[{\rm (3.17)} \Delta \boldsymbol{\sigma} = \boldsymbol{D}^{(p)} \cdot \Delta \boldsymbol{\varepsilon} \] \[\hspace{6em} \boldsymbol{D}^{(p)} = \boldsymbol{D}^{(e)} - \boldsymbol{S} \] \[\hspace{6em} \boldsymbol{D}^{(e)} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \] \[\hspace{6em} \boldsymbol{S} = \frac{1}{F} \left[ \begin{array}{cc} E_1^2 \left\{ C-\tan \phi \cdot \sigma_n) \tan \phi \right\}^2 & E_1 E_2 \tau ( C-\tan \phi \cdot \sigma_n) \tan \phi \\ {\rm sym.} & E_2^2 \cdot \tau^2 \end{array} \right] \]
降伏関数 $\hspace{4em}$ $ f = \tau^2 + \frac{1}{4}\sigma^2 - C^2 $
降伏条件 $\hspace{4em}$ $ f = 0 $
塑性流れ則 $\hspace{3em}$ $ \Delta \varepsilon_n^{(p)} = \lambda \displaystyle \frac{\partial f}{\partial \sigma_n} $ $\hspace{2em}$ $ \Delta \gamma^{(p)} = \lambda \displaystyle \frac{\partial f}{\partial \tau} $
ひずみ増分 $\hspace{3em}$ $ \Delta \varepsilon_n^{(e)} = \Delta \varepsilon_n - \Delta \varepsilon_n^{(p)} $
$\hspace{10em}$ $ \Delta \gamma^{(e)}=\Delta \gamma - \Delta \gamma^{(p)} $
応力-ひずみ関係(力-相対変位関係) \[\hspace{8em} \left\{ \begin{array}{c} \Delta \sigma_n \\ \Delta \tau \end{array} \right\} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \left\{ \begin{array}{c} \Delta \varepsilon_n^{(e)} \\ \Delta \gamma^{(e)} \end{array} \right\} \] 塑性条件 $\hspace{4em}$ $ \displaystyle \frac{\partial f}{\partial \sigma_n} \cdot \Delta \sigma_n + \displaystyle \frac{\partial f}{\partial \tau} \cdot \Delta \tau = 0 $ 以上を整理すると,$\lambda$ が以下のように計算される. \[\hspace{2em} \lambda = \frac{1}{F} \left( E_1 \cdot \frac{\sigma_n}{2} \cdot \Delta \varepsilon_n + 2 E_2 \cdot \tau \cdot \Delta \gamma \right) \] \[\hspace{4em} F = \left( \frac{1}{4} E_1 \cdot \sigma_n^2 + 4 E_2 \cdot \tau^2 \right) \] したがって,塑性化後の構成式は以下のようになる. \[{\rm (3.17)} \Delta \boldsymbol{\sigma} = \boldsymbol{D}^{(p)} \cdot \Delta \boldsymbol{\varepsilon} \] \[\hspace{6em} \boldsymbol{D}^{(p)} = \boldsymbol{D}^{(e)} - \boldsymbol{S} \] \[\hspace{6em} \boldsymbol{D}^{(e)} = \left[ \begin{array}{cc} E_1 & 0 \\ 0 & E_2 \end{array} \right] \] \[\hspace{6em} \boldsymbol{S} = \frac{1}{F} \left[ \begin{array}{cc} \frac{1}{4} E_1^2 \cdot \sigma_n^2 & E_1 \cdot E_2 \cdot \tau \cdot \sigma_n \\[1em] {\rm sym.} & 4E_2^2 \cdot \tau^2 \end{array} \right] \] トレスカの条件ではせん断ばねを切断する,すなわち, $k_s=0$ とすることによって塑性化後の構成式を表現することができた.しかし,一般的には構成式の非対角項が0でなくなるため,
そこで,塑性化後の剛性行列も弾性時の剛性行列と同様,陽な形で求めておく必要がある.これについては
3-3 非線形計算法
非線形性には材料的なものと幾何学的なものの2種類がある.前者の材料非線形性においても,クリープなどに代表される時間依存性の問題とそうでない問題に分けられる.本書ではこれらのうち時間に依存しない材料非線形問題の取り扱いについて述べる.材料非線形問題の数値計算法については,これまで多くの方法が提案されてきた.特にマトリックスを用いるFEMでは,その性質を巧みに利用した研究も数多く発表されている.どの方法を用いるかは解析モデルとの適応性や問題の性質にもよるため,一概に述べることはできないが,少なくとも,数値計算を行う場合には組織的なアルゴリズムとなるよう心がけなければならない.
一般的な非線形計算法は大きく以下の3つに分類することができる.
- 1)荷重増分法
- 2)反復法
- 3)混合法
一方,(2)の
これら,両者の欠点を補った方法が
以上のような非線形計算法については専門書に譲り,本書ではあまり深く触れない.
さて,RBSMでは崩壊荷重や破壊パターンの解析を主な目的としている.すなわち,多少変位が犠牲となったとしても,むしろ,より厳密に崩壊荷重を求め,また,各荷重レベルにおける破壊箇所を調べることに重点を置いている.このような考え方に基づいた場合,荷重増分法はRBSMにおける非線形解析法として適した方法の1つであるといえる.RBSMによる反復法や混合法を用いた解析も行われているが,本書ではRBSMによる離散化極限解析でよく利用されている荷重増分法について説明する.荷重増分法における代表的なアルゴリズムとしては
山田の方法は各荷重増分段階で要素を一つずつ降伏させ,要素を降伏させるために必要な荷重増分量を自動的に定める方法である.この方法は要素数が多く,破壊が進行すると,それに伴い計算時間もかかつてくるが,載荷途中の破壊状況を検討したり崩壊荷重をより厳密に求めるのに適しており,RBSMの特徴や解析目的と良く適合する.
山田の方法はFEM解析のために開発されているが,RBSMによる離散化極限解析に対しても多少の変更により適用することができる.RBSMによりこの手法を考えた場合,ばねを一つずつすべらせ,それに必要な荷重増分を自動的に決定するといった様に,FEMにおける要素をばねに置き換えて考えればよい.
ここで,山田の方法を用いた場合の解析の流れを簡単にまとめておく.
- 1)荷重増分段階のはじめに塑性化した(すべりの発生した)ばねとそうでないばねに分けて考え,すべりが発生したばねについては前節で求めた塑性化後のばね行列 $\boldsymbol{D}^{(p)}$ を用いてばね剛性行列を作成し,全体剛性行列に組み込む.なお,塑性化後のばね剛性行列は前荷重増分段階の応力から決定する.
- 2)与えられた荷重増分に対して,(1)で作成した全体剛性行列を解き,増分変位 $\boldsymbol{\Delta u}$,増分表面力 $\boldsymbol{\Delta \sigma}$ を求める.
- 3)この結果得られた増分表面力を前回までの表面力に加え合わせ,その表面力のすべてが降伏強度と等しいか,あるいは小さくなるような
荷重増分率 $r_{\rm min}$ を計算する. - 4)(3)で求められた $r_{\rm min}$ を
増分変位 $\boldsymbol{\Delta u}$ と増分表面力 $\boldsymbol{\Delta \sigma}$ に掛け,前回までの変位と表面力に加え合わせる.この結果得られた変位と表面力を今回の全変位及び全表面力とする.降伏したばねは以後,除荷が発生するまで,塑性流れ則に従い降伏曲面上を移動するものと考える. - 5)(l)~(4)を所定の荷重に達するまで繰り返す.
以上のように,荷重増分率 $r_{\rm min}$ を計算することによって,全荷重の $r_{\rm min}$ 倍の荷重が作用したときの破壊状況を知ることができる. $r_{\rm min}$ は全ばねのうち最小のものから決定されてゆくため,ばねは一つずつ降伏してゆくことになる.なお,全荷重が作用し終わると $r_{\rm min}$ の合計は1となる.
ここで,$r_{\rm min}$ の別な利用法を考えてみよう.例えば,設計においてある荷重 $P$ を想定していたとしよう.このとき,構造物が $P$ という荷重により崩壊しないように安全率を考慮しているのが普通である.そこで,設計荷重の何倍の荷重が作用したときその構造物が崩壊するかを知つておく必要がある.このような計算では $r_{\rm min}$ が1になっても計算を終了させず,構造物がメカニズムを形成するまで計算する.その結果,得られた荷重増分率 $r_{\rm min}$ の合計は,構造物が破壊するときの設計荷重に対する倍率になる.設計の段階でこの計算を行っておけば,構造物の安全性や経済性のチェックができる.山田の方法をRBSMによる離散化極限解析に適用した場合の各種降伏条件に対する荷重増分率 $r_{\rm min}$ の計算法を以下に示す.
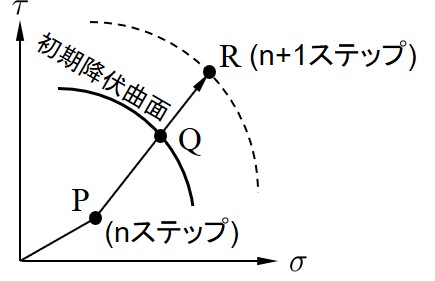
前回までの表面力,すなわち,(n)ステップ目の表面力を $(\sigma_n, \tau)$ とし,新しい荷重増分に対する増分表面力を $(\Delta \sigma_n, \Delta \tau)$としたとき,(n+1)ステップ目の,すなわち,今回の表面力が降伏曲面上にあるためには,以下の式を満足していなければならない. \[{\rm (3.20)} ( \tau + r \cdot \Delta \tau)^2 = C^2 \] ここで,$r$ は荷重増分率であり,今回の増分表面力を $r$ 倍し,前回までの表面力に加え合わせたとき,その全表面力が降伏曲面上にあることを示している.このような計算は,一つの荷重増分の段階で近似的に線形問題として解いているため可能となる.
(1)のトレスカの条件と同様,前回までの表面力を $(\Delta \sigma_n, \Delta \tau)$ とし,今回の荷重増分に対する増分表面力を $(\Delta \sigma_n, \Delta \tau)$ として,表面力が降伏曲面上にある条件を求めると, \[{\rm (3.24)} \left( \tau + r \cdot \Delta \tau \right)^2 = \left\{ C - (\sigma_n + r \cdot \Delta \sigma_n) \tan \phi \right\}^2 \] となる.これを $r$ について整理すると, \[{\rm (3.25)} \left\{ \Delta \tau^2 - ( \Delta \sigma_n \tan \phi)^2 \right\} r^2 + 2 \left\{ \tau \cdot \Delta \tau + (C-\sigma_n \tan \phi) \Delta \sigma_n \tan \phi \right\} r \] \[\hspace{24em} + \left\{ \tau^2 - (C - \sigma_n \tan \phi)^2 \right\} = 0 \] となる.したがって,$r$ は
(l)(2)同様,荷重増分率を $r$ として, \[{\rm (3.27)} \frac{1}{4} \left( \sigma_n + r \cdot \Delta \sigma_n \right)^2 + \left( \tau + r \cdot \Delta \tau \right)^2 = C^2 \] と考えることができる.これを $r$ について整理すると, \[{\rm (3.28)} \left( \frac{1}{4} \Delta \sigma_n^2 + \Delta \tau^2 \right) r^2 + \left( \frac{1}{2} \sigma_n \Delta \sigma_n + 2 \tau \cdot \Delta \tau \right) r + \left( \frac{1}{4} \sigma_n^2 + \tau^2 - C^2 \right) = 0 \] となる.これより,$r$ は