軸方向に圧縮力受ける部材を
柱(column)という.柱に荷重を加えると,柱は荷重に耐えきれなくなり,ついには破壊をする.柱の破壊には
図6.1.1に示すような2つ破壊パターンがある.
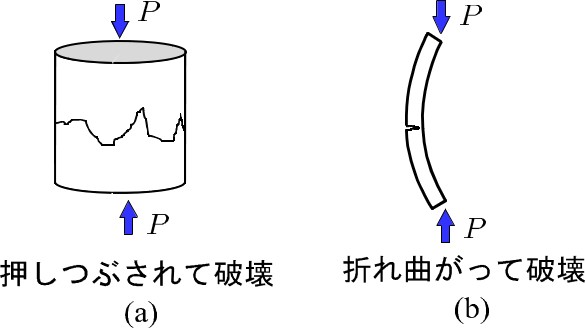
$\hspace{6em}$図6.1.1 柱の破壊
図(a)は押しつぶされて破壊するパターンで,このような破壊を
圧座(bursting)という.一方,
図(b)は折れ曲がって破壊するパターンで,このような破壊を
座屈(buckling)という.圧座の場合,材料の許容応力がすべて有効であるが,座屈の場合には,部材の内部応力が許容応力に達する前に破壊するため,設計に際しては充分注意を払わなければならない.
一般に,柱の断面が大きいほど折れ曲がりにくくなるが,これを表す量として以下に示す断面2次半径 $r$ が利用される.
\[
{\rm (6.1.1)}
r = \sqrt{\frac{I}{A}}
\]
ここで,$I$ は断面2次モーメント,$A$ は断面積を表している.一方,柱の長さ $l$ が長いほど折れ曲がって破壊しやすくなる.これら,2つの量の比
\[
{\rm (6.1.2)}
\lambda = \frac{l}{r}
\]
を
細長比(slenderness ratio)と呼んでいる.細長比が大きいほど座屈しやすくなる.
一般に,圧座によって破壊する柱を
短柱(short column)と呼んでおり,座屈によって破壊する柱を
長柱(long column)と呼んでいる.ただし,両者の明確な区別は難しい.
図6.2.1に示すように,柱の軸に一致する軸方向荷重 $P$ を
中心軸圧縮荷重といい,このような荷重が作用する柱を
中心圧縮柱と呼んでいる.
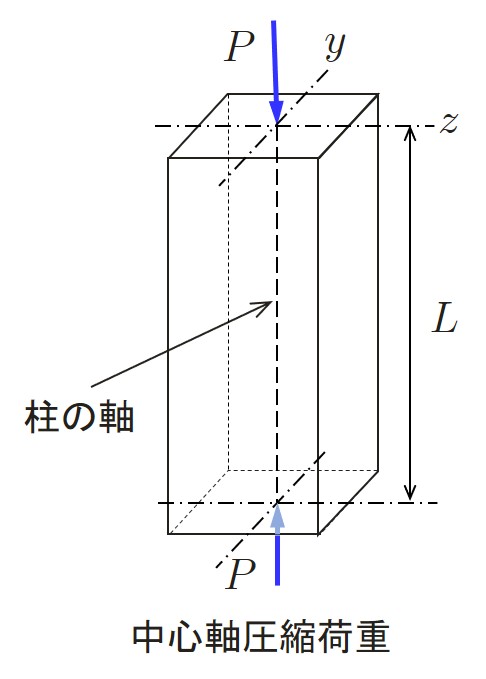
$\hspace{2em}$図6.2.1 中心圧縮柱
したがって,中心圧縮柱は軸方向圧縮力のみが生じ,そのときの応力度は以下のように計算される.
\[
{\rm (6.2.1)}
\sigma = - \frac{P}{A}
\]
ここで,$P$ は中心軸圧縮荷重を,$A$ は柱の断面積を表している.また,引張を正と考えているため,負号が付いている.
例題6.2.1
図6.2.2に示すような,幅 $a$,高さ $b$ の長方形断面を有する長さ $l$ の短柱の頂点に中心軸圧縮荷重 $P$ が作用した場合の短柱の応力とひずみ,変形量を求めてみよう.ただし,短柱のヤング係数を $E$ とする.

$\hspace{1em}$図6.2.2 中心圧縮柱
荷重 $P$ は,中心軸圧縮荷重であるから,柱の先端の長方形断面の図心軸 $G$ に作用している.棒の軸(断面の図心軸を連ねた線)に力の作用線が一致する荷重が作用する場合には,棒の断面には軸力 $N$ のみが発生し,この場合の断面の応力度は
式(6.2.1)に示すように,軸力 $N$ を断面積 $A$ で割った値(すなわち単位面積あたりの力)で求められるから,断面の垂直応力度 $\sigma_N$ は以下で与えられる.
\[
{\rm (6.2.2)}
\sigma_N = \frac{N}{A} = - \frac{P}{a \times b}
\]
ただし,棒の軸力は引張力を正,圧縮力を負とする.
断面力としての軸力は
図6.2.3に示すように,断面に生ずる応力度の合計であり,断面力を別名
全応力あるいは
合応力ともいう.
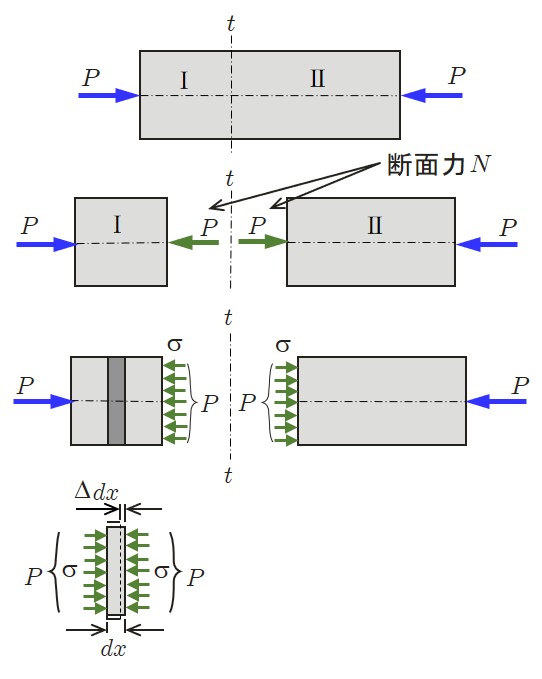
$\hspace{8em}$図6.2.3 軸圧縮
軸力 $N$ を受ける棒の縮み(または伸び)は弾性体である棒のフックの法則を用いて計算することができる.フックの法則は,軸力を受ける棒の場合には $\sigma=E \varepsilon$ で与えられ.したがって,棒のひずみは,軸力 $N$ が圧縮力であること,すなわち $-P$ であることを考慮して以下のように求められる.
\[
{\rm (6.2.3)}
\varepsilon = \frac{\sigma}{E}
= \frac{1}{E} \left( \frac{N}{A} \right)
= \frac{N}{EA}
= - \frac{P}{abE}
\]
一方,ひずみ $\varepsilon$ は棒の変形前後の長さを$l$,$l' (=l+\Delta l)$ とすると,$\varepsilon=(l'-l)/l=\Delta l/l$ で定義されるから,変形量 $\Delta l$ は次のようになる.
\[
{\rm (6.2.4)}
\sigma = E \cdot \varepsilon
= E \frac{\Delta l}{l}
\hspace{2em} \therefore \hspace{1em}
\Delta l = \frac{l}{E} \sigma
\]
ここで,
式(6.2.2)を
式(6.2.4)に代入すると棒の変形量 $\Delta l$ が,伸びを正,縮みを負として,次式のように求まる.
\[
{\rm (6.2.5)}
\Delta l = \frac{l}{E} \times \frac{N}{A}
= \frac{l}{E} \times \frac{-P}{a \times b}
= - \frac{Pl}{abE}
\]
一般に,断面積を $A$,長さを $l$,ヤング係数を $E$,軸力を $P$ とした場合の力と変形の関係は
式(6.2.5)より
\[
{\rm (6.2.6)}
\Delta l = \frac{l}{EA}P
\hspace{2em} \therefore \hspace{1em}
P = \frac{EA}{l} \cdot \Delta l = k \cdot \Delta l
\]
と表すことができ,ばね定数を $k=EA/l$ としたときの力と変形の関係と同じ結果となる.
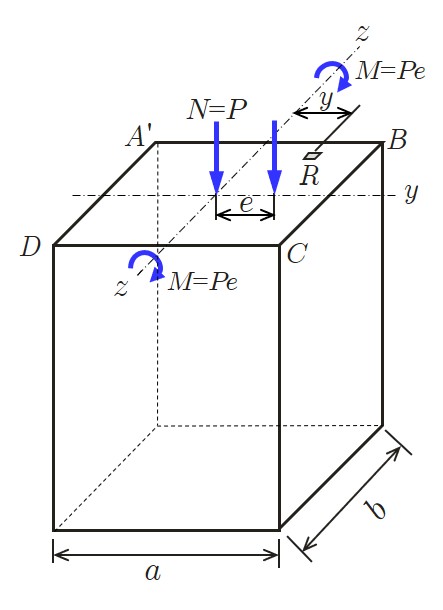
図6.2.4に示すように,荷重 $P$ が $y$ 方向に $e$ だけ離れた点に作用した場合について考えてみよう.このように,部材の軸( $x$ 軸)に一致しない荷重を
偏心荷重という.

$\hspace{0em}$図6.2.4 偏心圧縮柱
いま,
図6.2.5(a)に示すような柱を
図(b)に示すように断面 $t-t$ で2つに分け,断面に生ずる力(合応力と断面力)と応力度について調べてみよう.
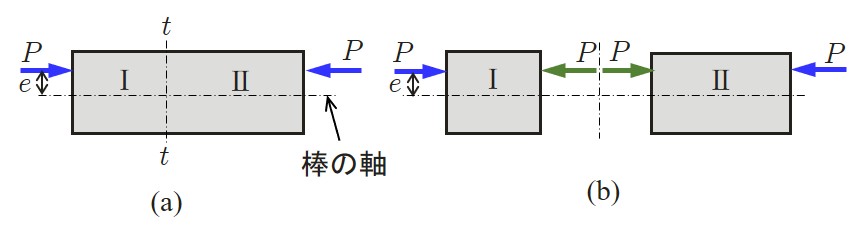
$\hspace{5em}$図6.2.5 偏心荷重が作用した柱
力 $P$ が柱の軸を通っていないため,
図6.2.6(a)に示すように,柱の軸に沿って両端から左右一対の力 $P$ を加える.これらの力は相殺されるため,荷重状態に変化は生じない.このとき,図の丸で囲んだ2つの力,すなわち,中心軸圧縮荷重 $P$ と偏心荷重 $P$ による偶力のモーメント $M=P \cdot e$ が生ずる.断面 $t-t$ においても
図(b)のように同様な偶力によるモーメントが生じている.これは,柱に
図(c)に示すような中心軸圧縮荷重 $P$ による軸力 $N$ と曲げモーメント $M=P \cdot e$ が作用した状態と考えることができ,したがって,$t-t$ 断面においても,同様に
図(d)のような断面力が作用する.
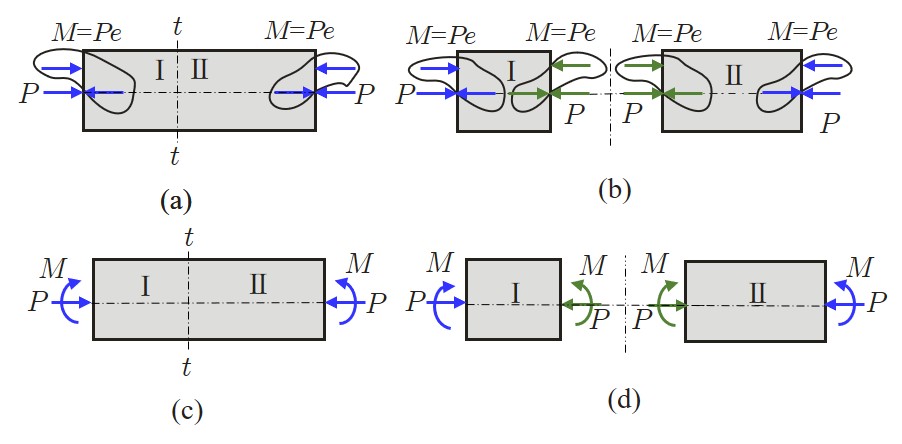
$\hspace{5em}$図6.2.6 偏心荷重を受ける柱の断面力
さて,断面力 $N$,$M$ は断面の応力度の合計であり,
5章において説明したように,これらの断面力によって,以下に示す垂直応力が生ずる.
(軸力による垂直応力)
\[
\sigma_N = \frac{N}{A}
\]
(曲げモーメントによる垂直応力)
\[
\sigma_M = \frac{M}{I_z}y
\]
ここで,$A$ は柱の断面積,$I_z$ は図心軸 $z$ に関する断面2次モーメント,$y$ は図心軸からの距離である.図6.2.7は柱の断面に生ずる,それぞれの垂直応力が示されている.
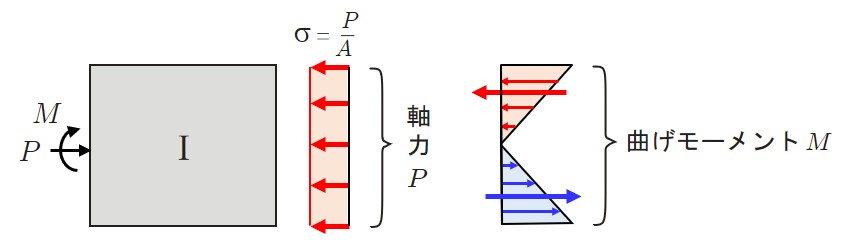
$\hspace{8em}$図6.2.7 断面に生ずる応力
したがって,断面に生ずる垂直応力が以下のように求められる.
\[
{\rm (6.2.7)}
\sigma = \sigma_N + \sigma_M = \frac{N}{A} \pm \frac{M}{I_z} y
\]
式中の符号は応力度の符号の約束により定められる.例として引張応力度を正とした場合には,軸力 $N$ が圧縮力であるから,その応力度 $\sigma_N$ は断面のいたるところ $-P/A$ であり,曲げモーメントによる応力度 $\sigma_M$ は
図6.2.8の右側で負,左側で正である.
 $\hspace{4em}$図6.2.8 柱の断面
$\hspace{4em}$図6.2.8 柱の断面
したがって,図中の隅の点 $A'$,$B$ の応力度 $\sigma_A$,$\sigma_B$ の値を引張応力度を正として表すと以下のようになる.
\[
{\rm (6.2.8)}
\left.
\begin{array}{lcr}
\sigma_{A'} &=& \displaystyle - \frac{P}{A} + \frac{M}{I_z} y_{(y=a/2)} \\[1ex]
\sigma_B &=& \displaystyle - \frac{P}{A} - \frac{M}{I_z} y_{(y=a/2)}
\end{array}
\right\}
\]
式(6.2.8)から,偏心圧縮荷重が作用する場合には図心軸に対して荷重の存在する側の圧縮応力が増大し,反対側の圧縮応力は減少する.逆に,偏心引張荷重が作用する場合,図心軸に対して偏心荷重が存在する側の引張力が増大し,存在しない側の引張応力度は減少す少する.
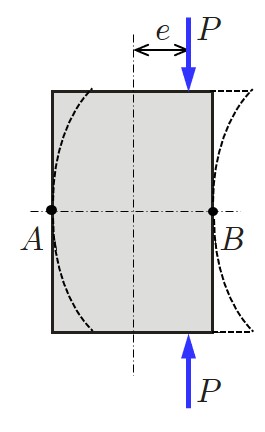
$\hspace{0em}$図6.2.9 偏心圧縮荷重
一般に,
図6.2.9に示すような偏心量 $e$ の位置に偏心荷重 $P$ が短柱に作用する場合,断面に生ずる最大最小の応力度は断面の両端部で生じ,以下のように求められる.
\[
{\rm (6.2.9)}
\left.
\begin{array}{lcrr}
\sigma_A &=& \displaystyle - \frac{P}{A} + \frac{M}{W_1} & (引張側)\\[1ex]
\sigma_B &=& \displaystyle - \frac{P}{A} - \frac{M}{W_2} & (圧縮側)
\end{array}
\right\}
\]
ここで,$W_1$,$W_2$ は,それぞれ,引張側と圧縮側の断面係数である.
例題6.2.2
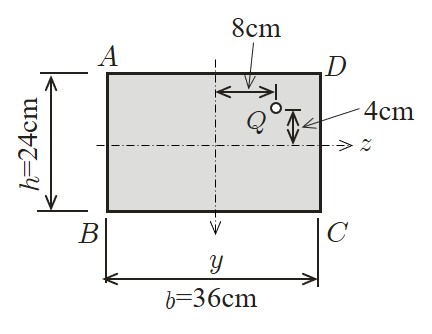
図6.2.10に示すような断面の点 $Q$ に圧縮荷重 $P=400 {\rm kN}$ が作用した場合の断面の四隅 $(A,B,C,D)$ の応力度を求めてみよう.
 $\hspace{2em}$図6.2.10 短柱の断面
$\hspace{2em}$図6.2.10 短柱の断面
この断面の断面積および,$y$ 軸と $z$ 軸に関する断面2次モーメントは以下のように計算される.
\[
A = b \cdot h = 36 \times 24 = 864 \; {\rm cm^2}
\]
\[
I_Z = \frac{bh^3}{12} = \frac{36 \times 24^3}{12} = 41472 \; {\rm cm^4}
\]
\[
I_y = \frac{hb^3}{12} = \frac{24 \times 36^3}{12} = 93312 \; {\rm cm^4}
\]
一方,図心軸を基準とした場合の曲げモーメントは,$z$ 方向の偏心量が $e_z=8 {\rm cm}$,$y$ 方向の偏心量が $e_y=-4 {\rm cm}$ であり,軸力が $N=-P=-400 {\rm kN}$ であるため,以下のような各軸に関する曲げモーメントが得られる.
\[
M_z = N \cdot e_y = -400000 \times (-0.04) = 16 \; {\rm kN\cdot m}
\]
\[
M_y = N \cdot e_z = -400000 \times (0.08) = 32 \; {\rm kN\cdot m}
\]
ここで,$M_z$ は $z$ 軸周り,$M_y$ は $y$ 軸周りの曲げモーメントである.
このとき,断面内の任意点のおける応力は
\[
\sigma = \frac{N}{A} + \frac{M_z}{I_z} y + \frac{M_y}{I_y} z
= \frac{-400 \times 10^3}{864 \times 10^{-4}}
+ \frac{16 \times 10^3}{41472 \times 10^{-8}}y
+ \frac{32 \times 10^3}{93312 \times 10^{-8}}z
\]
\[
\hspace{1em}
= -4.63 + 38.58y - 34.29z
\]
で与えられるため,四隅の応力度が以下のように求まる.
\[
\sigma_A = -4.63 + 38.58 \times (-0.12) - 34.29 \times (-0.18)
= -3.087 \; {\rm MPa}
\]
\[
\sigma_B = -4.63 + 38.58 \times 0.12 - 34.29 \times (-0.18)
= 6.172 \; {\rm MPa}
\]
\[
\sigma_C = -4.63 + 38.58 \times 0.12 - 34.29 \times 0.18
= -6.172 \; {\rm MPa}
\]
\[
\sigma_D = -4.63 + 38.58 \times (-0.12) - 34.29 \times 0.18
= -15.432 \; {\rm MPa}
\]
式(6.2.9)において,偏心荷重 $P$,断面積 $A$,曲げモーメント $M$,断面2次モーメント $I$ の値に応じて引張側の応力度が0となる場合がある.このときの荷重の作用位置,すなわち図心軸からの偏心量を求めてみよう.
いま,偏心量を $e$ とすると,曲げモーメントは $M=Pe$ で与えられるから,応力が0となる場合の
式(6.2.9)は次のようになる.
\[
{\rm (6.2.10)}
0 = -\frac{P}{A} + \frac{P \cdot e}{W}
\]
これより,応力が0となる偏心量が以下のように求まる.
\[
{\rm (6.2.11)}
e = \frac{W}{A} \;\; ( \equiv k)
\]
式(6.2.11)において,$k$ は偏心荷重がある位置 $e$ に作用したときに,断面内に引張力が生じない限界点を表しており,このような点のことを
核点(core point)と呼んでいる.断面内のいたるところにおいて引張力が生じないような点を結んだ線を
核線といい,これによって囲まれた部分を
核(core)という.
いま,偏心量を $e$ とすると以下の関係が成立する.
\[
\begin{array}{cccll}
(ⅰ)& e \lt k &:& \sigma \lt 0&(断面のいたるところ圧縮応力度が生ずる)\\
(ⅱ)& e = 0 &:& \sigma = 0 &(断面のいたるところ応力度が0もしくは圧縮)\\
(ⅲ)& e \gt k &:& \sigma \gt 0&(断面に引張応力度が生ずる)
\end{array}
\]
次に代表的な断面の核を求めてみよう.
図6.2.11に示す高さ $H$,幅 $B$ の長方形断面の場合,断面積 $A$ と,$x$ および $y$ 軸に関する断面係数 $W_x$,$W_y$ は次のように与えられる.
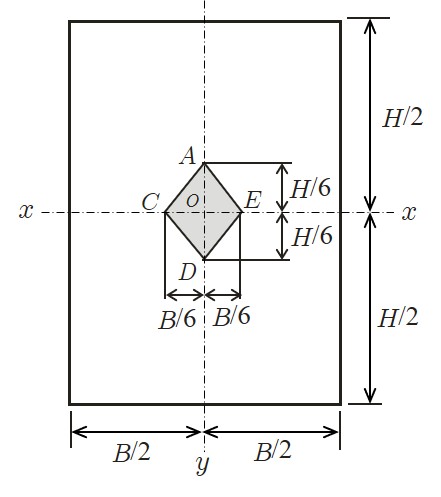 $\hspace{2em}$図6.2.11 長方形断面の核
$\hspace{2em}$図6.2.11 長方形断面の核
\[
A = BH \;\;,\;\;
W_x = \frac{BH^2}{6} \;\;,\;\;
W_y = \frac{HB^2}{6}
\]
したがて,
式(6.2.11)より $x$ ならびに $y$ 軸方向の核点が以下のように求まる.
\[
{\rm (6.2.12)}
\left.
\begin{array}{l}
(x軸方向)\; k_x \displaystyle
= \frac{W_y}{A}
= \frac{\displaystyle \frac{HB^2}{6}}{BH}
= \frac{B}{6} \\
(y軸方向)\; k_y \displaystyle
= \frac{W_x}{A}
= \frac{\displaystyle \frac{BH^2}{6}}{BH}
= \frac{H}{6}
\end{array}
\right\}
\]
以上より長方形断面核がが
図6.2.11の網掛け部分のように求まる.ここで,図中の $AOD$ と $COE$ は,それぞれ,高さと幅の1/3となり,これらのことを
中央3分の1(middle third)と呼んでいる.
図6.2.12に示す直径 $d$ の円形断面の場合の核を求めてみよう.
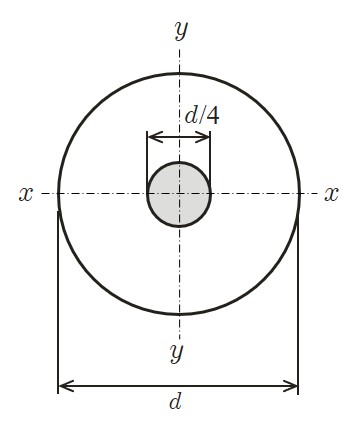 $\hspace{2em}$図6.2.12 円形断面の核
$\hspace{2em}$図6.2.12 円形断面の核
円軽断面の場合,$x$ 軸および $y$ 軸に関する断面係数 $W_x$,$W_y$ は同一となり,以下のように与えられる.
\[
A = \frac{\pi d^2}{4} \;\;,\;\;
W_x = W_y = \frac{\pi d^3}{32}
\]
ここで,$A$ は断面積である.したがて,核点は次のようになる.
\[
{\rm (6.2.13)}
k = k_x = k_y
= \frac{\displaystyle \frac{\pi d^3}{32}}{\displaystyle \frac{\pi d^2}{4}}
= \frac{d}{8}
\]
以上より,核は
図6.2.12に示す網掛け部分となる.
例題6.2.3
図6.2.13(a)に示す上下左右対称の $I$ 形断面の核を求めてみよう.
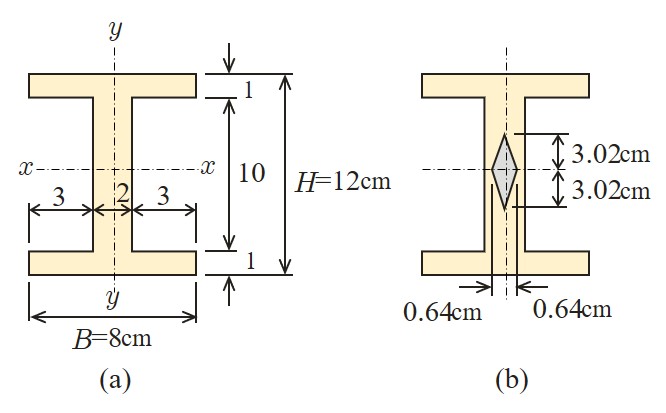
$\hspace{6em}$図6.2.13 I形断面の核
この断面の断面諸量は以下のように計算される.
\[
A = 2 \times 8\times 1 + 10 \times 2 = 36 \; {\rm cm^2}
\]
\[
I_x = \frac{8 \times 12^3}{12} - \frac{6 \times 10^3}{12} = 652 \; {\rm cm^4}
\]
\[
I_y = 2 \times \frac{1 \times 8^3}{12} + \frac{10 \times 2^3}{12} = 92 \; {\rm cm^4}
\]
\[
w_x = \frac{I_x}{\frac{H}{2}} = \frac{652}{6} = 108.7 \; {\rm cm^3}
\]
\[
w_y = \frac{I_y}{\frac{B}{2}} = \frac{92}{4} = 23 \; {\rm cm^3}
\]
ここで,$A$ は断面積,$I_x$,$I_y$ はそれぞれの軸に関する断面2次モーメント,$W_x$,$W_y$ は断面係数を表している.このとき,核点は以下のように求められる.
\[
k_x = \frac{W_y}{A} = \frac{23}{36} = 0.64 \; {\rm cm}
\;\;,\;\;
k_y = \frac{W_x}{A} = \frac{108.7}{36} = 3.02 \; {\rm cm}
\]
したがって,核は
図6.2.13(b)に示す網掛け部分となる.
圧縮を受ける細長比の小さい部材の材質が不均一であったり,柱の中心線と荷重方向が完全に一致していな場合,柱の中心線が直線でない場合等の種々の原因により,部材内に曲げ応力が発生する.この曲げ応力は荷重の増加ととも増加し,座屈と呼ばれる不安定現象が部材に生じて圧縮応力が許容応力に達する前に部材が急激に破壊する.このときの荷重を
座屈荷重(buckling load)あるいは
限界荷重(critical load)と呼んでいる.また,座屈直前の応力を
座屈応力(buckling stress)あるいは
限界応力(critical stress)という.このような,座屈に関する研究はオイラー(Euler)によって行われ,
オイラーの座屈理論と呼ばれている.
いま,
図6.3.1に示すように,長さ $l$ の柱が両端がヒンジで結合され,上下端から圧縮荷重 $P$ が作用している状態を考えてみよう.
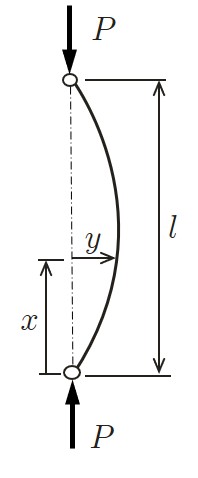 $\hspace{0em}$図6.3.1 両端ヒンジの柱
$\hspace{0em}$図6.3.1 両端ヒンジの柱
載荷点から $x$ だけ離れた点におけるたわみを $y$ とすると,$x$ 点における曲げモーメント $M$ は以下のようなる.
\[
{\rm (6.3.1)}
M = P \cdot y
\]
部材のヤング率を $E$,断面2次モーメントを $I$ として,
式(6.3.1)で表される曲げモーメントをはりのたわみの微分方程式の代入すると以下のようになる.
\[
{\rm (6.3.2)}
\frac{d^2y}{dx^2} = - \frac{M}{EI} = - \frac{P}{EI}y
\]
ここで,
\[
{\rm (6.3.3)}
k^2 = \frac{P}{EI}y
\]
として,
式(6.3.2)を書き換えるとたわみの微分方程式は以下のように書き改められる.
\[
{\rm (6.3.4)}
\frac{d^2y}{dx^2} + k^2 y = 0
\]
この微分方程式の一般解は
\[
{\rm (6.3.5)}
y = C_1 \cos kx + C_2 \sin kx
\]
であり,積分定数 $C_1$ および $C_2$ は上下端でたわみが0である条件より以下のように求められる.
\[
C_1 = 0 \;\;,\;\; C_2 \sin kl = 0
\]
ここで,$C_2 \ne 0$ であるから,上式の2番目の式が成立するためには,
\[
{\rm (6.3.6)}
\sin kl = 0
\]
でなければならない.これを
座屈条件式という.これを満足する $kl$ は $kl=n \pi (n=1,2,3,\cdots)$ であることより,
式(6.3.3)を用いて以下の関係が得られる.
\[
{\rm (6.3.7)}
P = k^2 EI = n^2 \pi^2 \frac{EI}{l^2}
\]
式(6.3.7)において,最小荷重値は $n=1$ である.この荷重が両端ヒンジの座屈荷重で,これを $P_{cr}$ で表すと以下のようになる.
\[
{\rm (6.3.8)}
P_{cr} = \pi^2 \frac{EI}{l^2}
\]
これを,両端ヒンジの長柱に対する
オイラーの座屈公式という.
一方,座屈応力 $\sigma_{cr}$ は断面2次半径を $r \left( = \sqrt{I/A} \right)$ として以下のように求められる.
\[
{\rm (6.3.9)}
\sigma_{cr} = \frac{P_{cr}}{A}
= \frac{\pi^2 EI}{l^2} \cdot \frac{r^2}{I}
= \frac{\pi^2 E}{\left( \frac{l}{r} \right)^2}
= \frac{\pi^2E}{\lambda^2}
\]
ここで,$\lambda$ は細長比である.
オイラーの公式は,座屈によって生ずる曲げ応力が弾性範囲内にあるという仮定のもとに誘導されているため,
式(6.3.9)による応力が弾性範囲内になければならない.
式(6.3.5)は $x=0$ で $y=0$(支点でたわみが0)より $C_1=0$ となるため,
\[
{\rm (6.3.10)}
y = C_2 \sin kx
\]
と書くことができる.
いま柱の中央 $x=l/2$ でたわみが $\delta$ であるとすれば
\[
{\rm (6.3.11)}
C_2 \sin k\frac{l}{2} = \delta
\]
なる関係が得られる.
式(6.3.6)の関係から,$kl=\pi$ として
式(6.3.11)に代入すると $C2=\delta$ となる.したがて,
式(6.3.10)は以下のように表すことができる.
\[
{\rm (6.3.12)}
y = \delta \sin \frac{\pi x}{l}
\]
この式は $n=1$ のときの柱のたわみ曲線の式を表しており,一般的には次のように表す.
\[
{\rm (6.3.13)}
y = \delta \sin \frac{n \pi x}{l} \;\; (n=1,2,3,\cdots)
\]
図6.3.2は種々のnに対するたわみ曲線を示した図である.
 $\hspace{4em}$図6.3.2 長柱のたわみ
6.3.1節
$\hspace{4em}$図6.3.2 長柱のたわみ
6.3.1節で示した座屈荷重は両端ヒンジの柱に対するものであった.ここでは,いろいろ支点条件持つ柱の座屈荷重を求めてみよう.
図6.3.3に示すように一端自由で一端固定の柱は,両端ヒンジの柱を中央で2分し,半分を取り出したものと同じである.
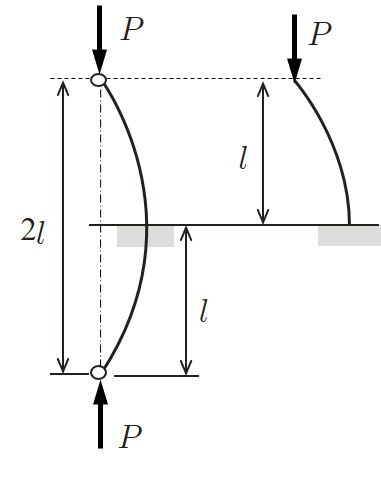
$\hspace{0em}$図6.3.3 一端固定・他端自由の柱
したがって,両端ヒンジの柱の座屈公式に対して,柱の長さ $l$ を $2l$ と置き換えることで一端固定・他端自由の座屈公式を得ることができる.
\[
{\rm (6.3.14)}
P_{cr} = \pi^2 \frac{EI}{4l^2}
\]
\[
{\rm (6.3.15)}
\sigma_{cr} = \frac{\pi E}{\displaystyle 4 \left( \frac{l}{r} \right)^2}
= \frac{\pi^2 E}{4 \lambda^2}
\]
両端固定に柱は,全体を4分の1に分割し,
図6.3.4に示す $A$ 点と $B$ 点の間が両端ヒンジの場合と等価になるという関係から座屈荷重を誘導することができる.
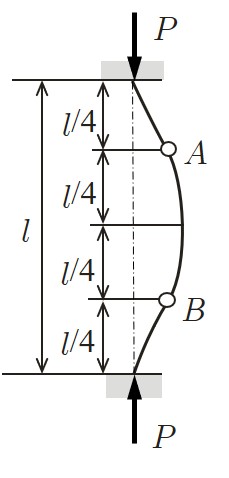 $\hspace{0em}$図6.3.4 両端固定の柱
$\hspace{0em}$図6.3.4 両端固定の柱
この場合,柱の長さ $l$ を $l/2$ と考えればよい.したがって,座屈荷重と座屈応力が以下のように求まる.
\[
{\rm (6.3.16)}
P_{cr} = 4 \pi^2 \frac{EI}{l^2}
\]
\[
{\rm (6.3.17)}
\sigma_{cr} = \frac{4 \pi E}{\displaystyle \left( \frac{l}{r} \right)^2}
= \frac{4 \pi^2 E}{\lambda^2}
\]
図6.3.5に示す一端固定,他端ヒンジの柱の場合は,若干の計算の後,

$\hspace{0em}$図6.3.5 一端固定・他端ヒンジの柱
\[
kl = 4.493
\]
を得る.この関係から,以下の座屈公式が得られる.
\[
{\rm (6.3.18)}
P_{cr} \approx 2 \pi^2 \frac{EI}{l^2}
\]
\[
{\rm (6.3.19)}
\sigma_{cr} \approx \frac{2 \pi^2 E}{\left( \displaystyle \frac{l}{r} \right)^2}
= \frac{2 \pi^2 E}{\lambda^2}
\]
いろいろな支点条件に対する座屈応力は以下のように整理することができる.
\[
{\rm (6.3.20)}
\sigma_{cr} = \beta \frac{ \pi^2 E}{\lambda^2}
\]
ここで,$\beta$ は支点条件によってきまる係数で,それそれの支点に応じて以下のようになる.
表5.3.1 係数 $\beta$ の値
| 支点の種類 |
$\beta$ |
|---|
| 両端固定 |
$4$ |
| 一端固定・他端ヒンジ |
$2$ |
| 両端ヒンジ |
$1$ |
| 一端固定・他端自由 |
$1/4$ |
トラス(truss)は,多数の直線部材の両端を全く摩擦のない
ヒンジ(hinge)によって順次,
図6.4.1に示すような三角形状に組み合わせ,接合した構造である.部材をヒンジにより接合した点のことを
滑節(pin joint)といい,それらを組み合わせた構造を
滑節骨組構造ともいう.
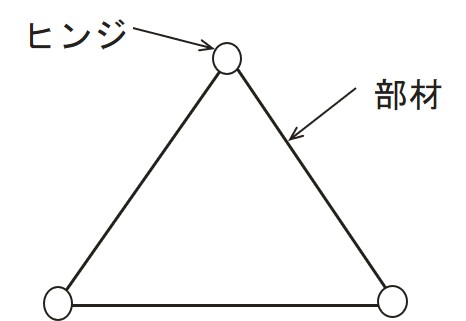
$\hspace{3em}$図7.4.1 トラス
トラス部材の力学的な特質は,各部材が引張もしくは圧縮の軸方向力のみ受けるこことであり,特に圧縮部材については,座屈などの柱で述べた重要な力学的挙動の検討が必要である.本書は,材料と部材の力学に関する入門書であり,構造については,あまり解説していないが,トラスは力学的に柱と密接な関係があるため,この節で簡単に取り上げる.
トラスは,実際の構造を理想化した構造とも考えられ,それゆえ,幾つかの計算上の仮定が設けられている.以下にその仮定を整理する.
- (1)各部材は摩擦のないピンまたはヒンジにより結合され,自由に回転できる.
- (2)各部材の部材軸は直線で,各節点において1点に集まる.
- (3)外力はすべてトラスと同一平面にあり,節点に集中して働き,部材中間には作用しない.
- (4)各部材は引張もしくは圧縮の軸方向力のみうけ,曲げモーメントおよびせん断力は作用しない.(柱も軸力を受ける部材である)
- (5)各部材の変形は極めて微小であって,その2次的な影響は考えなくてよい.
以上のような仮定のもとに求められた部材力を
1次応力(primary stress)という.実際のトラス構造における接合には,リベット結合や溶接結合が用いられており,ここでの仮定とはくいちがうが,一般的にはこの1次応力が支配的であるため,このような仮定を用いて計算が行われており,必要があれば別に剛結の影響を検討する.このような剛結によって生ずる応力を
2次応力(secondary stress)と呼んでいる.
代表的なトラスの種類を
図6.4.2に示す.
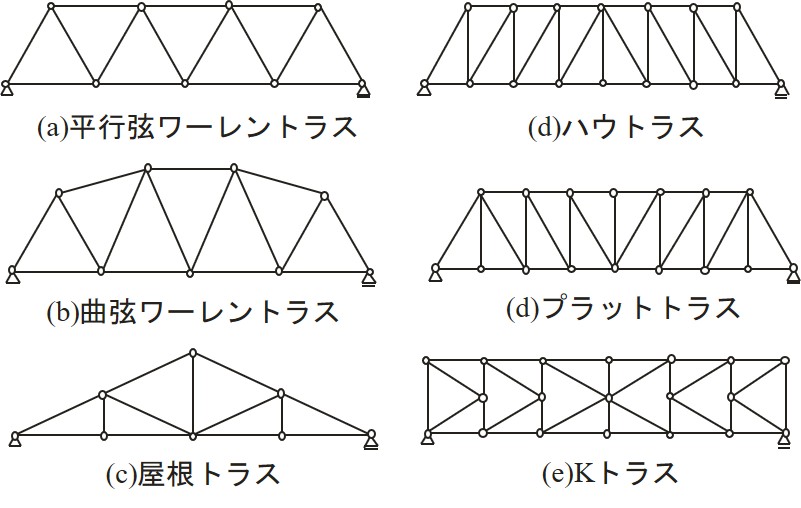
$\hspace{8em}$図7.4.2 トラスの種類
このようなトラスを構成する部材には名称が付けられている.
図6.4.3は簡単なハウトラスの例が示されている.トラスの外側を形成する部材を
弦材(chord member)といい,これは,位置によって,
上弦材(upper chord member)と
下弦材(lower chord member)に分けられる.この弦材を結合する部材が
腹材(web member)で,配置方法によって,
垂直材(vertical member)と
斜材(diagonal member)に分けられる.また,図中の $\lambda$ を
格間(panel length)と呼んでいる.
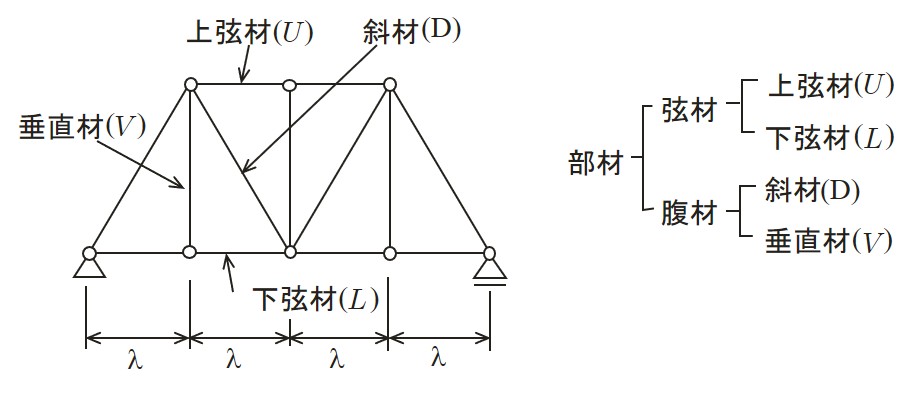
$\hspace{8em}$図7.4.3 トラス部材の名称
さて,このようなトラスの安定条件について考えてみよう.安定性の議論には,構造全体としての安定性とトラスとしての安定性の2つがある.は,
4章において述べた,静定構造物,不静定構造物,不安定構造物というとらえ方で,構造全体に対して
\[
\begin{array}{ll}
H=0 &(水平方向のつり合い)\\
V=0 &(鉛直方向のつり合い)\\
M=0 &(モーメントのつり合い)
\end{array}
\]
の3つの条件より反力が計算できるトラス構造を
外的静定トラスと呼んでいる.
一方,トラス構造では,トラスとしての機能をはたし,構造としての形態を保つこたができなければならない.例えば,
図6.4.4に示すような2つの構造を考えてみよう.
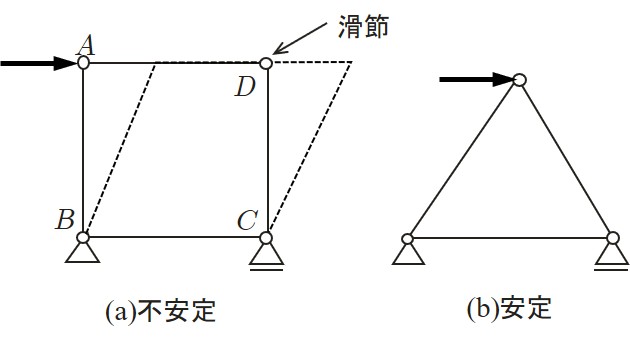
$\hspace{4em}$図6.4.4 トラスの安定・不安定
図(a)は $A$,$B$,$C$,$D$ の4点がヒンジの場合水平方向の外力が作用すると構造としての形態を維持することができない.逆に
図(b)では,水平のみならず,鉛直荷重が作用した場合においてもつぶれることはなく,安定をたもつことができる.このことを力学的に考えてみよう.いま,各滑節において水平方向と鉛直方向の2つのつり合い条件が成立している.これは滑節の数をjとすると2j個のつり合い条件を作成できることを意味する.もし,トラスが外的に安定な場合,構造全体に対する水平,鉛直方向のつり合い,モーメントのつり合いの3つを除いた $2j-3$ 個のつり合い条件が内部の独立なつり合い条件となる.したがって,部材数 $m$ が $2j-3$ より少なければ,内部的に不安定で,逆に $m$ が多ければ安定と考えることができる.先の例では
図(a)の場合,部材数が4で,内部的に独立なつり合い条件式の数は $2 \times 4-3=5$ であるから部材数が不足し,不安定であることがわかる.
図(b)は部材数が3,つり合い条件式の数が $2×3-3=3$ であるから安定である.
以上より,トラス全体が安定であるための必要条件を以下のように表すことができる.
\[
{\rm (6.4.1)}
m + r \ge 2 j
\]
ここで,$m$ は部材数,$r$ は支点反力の数,$j$ は滑節の数である.
式(6.4.1)において,等号が成立するトラスを内的静定トラスといい,外的に不静定であっても滑節の力のつり合いにより,つり合い条件のみで反力を求めることができる.
先にも述べたように,本書は,材料と部材の力学に関する入門書であるため,構造物の解析法についての詳細な説明は行わない.ここでは,トラス構造で用いられている解析法を簡単に述べる程度にし,詳細は別の参考書を参照してほしい.
節点法は,各節点における力のつり合い方程式を用いて部材力を求める方法である.荷重や部材力はすべて節点に働き,その力の作用線はすべて節点に集まるから,つり合い条件としては,
\[
\begin{array}{ll}
H=0 &(水平方向のつり合い)\\
V=0 &(鉛直方向のつり合い)
\end{array}
\]
の2つを用い,モーメントのつり合いは自動的に満足される.
このように,節点法では各節点の力のつり合いをすべての節点について行い,部材力を求めるのだが,計算を行うに当たり,一番はじめに着手する節点は未知数(部材力)が2つの節点を選ぶと効率的なことが多い.
図6.4.5に示すトラスの部材力と反力を節点法により求めてみよう.このトラスは内的静定トラスである.

$\hspace{2em}$図6.4.5 簡単なトラス
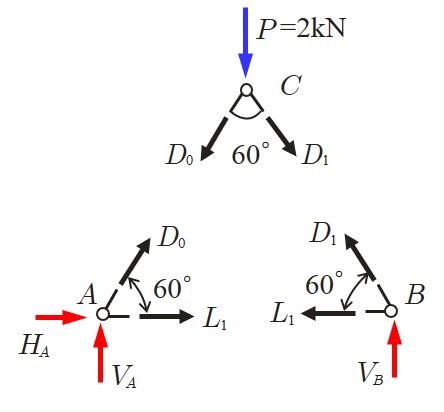
$\hspace{0em}$図6.4.6滑節におけるつり合い
(節点Cのつり合い)
\[
\begin{array}{lcr}
\sum H = 0 &:& -D_0 \cos 60^{\circ} + D_1 \cos 60^{\circ} = 0 \\
\sum V = 0 &:& D_0 \sin 60^{\circ} + D_1 \sin 60^{\circ} + 2 = 0
\end{array}
\]
(節点Aのつり合い)
\[
\begin{array}{lcr}
\sum H = 0 &:& L_1 + D_0 \cos 60^{\circ} + H_A = 0 \\
\sum V = 0 &:& D_0 \sin 60^{\circ} +V_A = 0
\end{array}
\]
(節点Bのつり合い)
\[
\begin{array}{lcr}
\sum H = 0 &:& L_1 + D_1 \cos 60^{\circ} = 0 \\
\sum V = 0 &:& D_1 \sin 60^{\circ} +V_B = 0
\end{array}
\]
以上より,各部材の軸力と反力が以下のように求まる.
\[
D_0 = D_1 = - 1.15 {\rm kN} \;\;,\;\; L_1 = 0.58 {\rm kN}
\]
\[
H_A = 0 V_A = V_B = 1.0 {\rm kN}
\]
節点法では,特定の部材の断面力を求めるのに手間がかかることがある.そこで,構造全体を求めたい部材を含む形で分割し,分割した左側(あるいは右側)のつり合いより断面力を求める.ただし,つり合い条件は3つであるから,切断面における部材数は3部材以下でなければならない.このような計算法を
断面法という.断面法にはCulmannの方法やRitterの方法があるが,ここでは,Culmannの方法で部材力を求める方法を説明しよう.
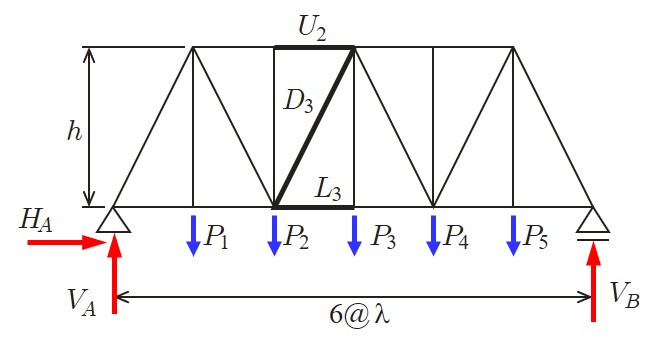
$\hspace{6em}$図6.4.7 任意のトラス部材
図6.4.7のトラスにおいて,上弦材 $U_2$,斜材 $D_3$,下弦材 $L_3$ の部材力を求めたものとする. このとき,この3つの部材を含むように構造を切断する.
図6.4.8は切断した左側が示されている.
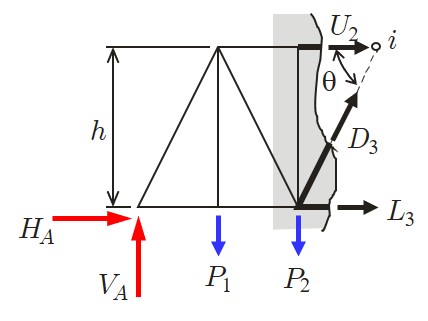
$\hspace{3em}$図6.4.8 任意切断面のつり合い
この状態をもとにつり合い条件をたてると以下のようになる.
\[
\begin{array}{lcl}
\sum H = 0 &:& U_2 + L_3 + D_3 \cos \theta + H_A = 0 \\
\sum V = 0 &:& V_A - (P_a+P_2) + D_3 \sin \theta = 0 \\
\sum M_i = 0 &:& V_A \times 3 \lambda - H_A \times h - P_1 \times 2 \lambda
- P_2 \times \lambda - L_3 \times h = 0
\end{array}
\]
上式は未知数(部材力)が3つで,方程式が3つであるから解くことができ,求めたい部材の部材力が直接的に計算できる.
ただし,この方法では,反力がすでに求まっていることが必要である.