3.1.1 断面1次モーメントの定義
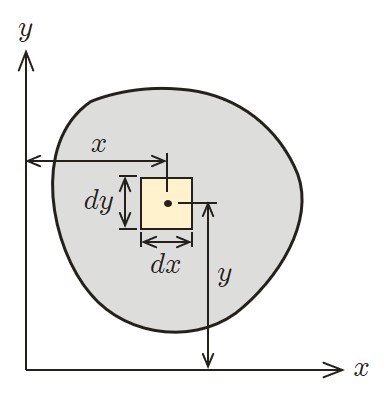
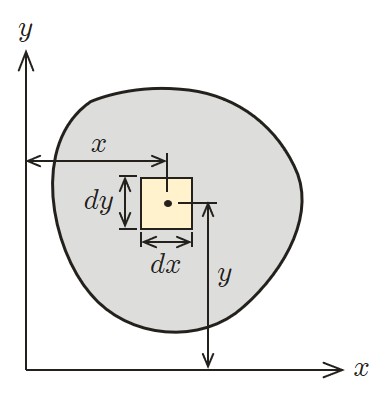
図3.1.1に示すようなある形状の断面が与えられたとする.
 $\hspace{0em}$図3.1.1 断面1次モーメントの定義
$\hspace{0em}$図3.1.1 断面1次モーメントの定義
このとき,断面内の微小面積 $dA$ は
\[
{\rm (3.1.1)}
dA = dx dy
\]
である.いま,この微小面積に対する
断面1次モーメント(geometrical moment of area)を力のモーメントと同様,以下のように定義する.
( $x$ 軸に関する断面1次モーメント)
\[
{\rm (3.1.2a)}
dG_x = y dA = y dx dy
\]
( $y$ 軸に関する断面1次モーメント)
\[
{\rm (3.1.2b)}
dG_y = x dA = x dx dy
\]
このとき,全断面に関する断面1次モーメントは以下のように求めることができる.
( $x$ 軸に関する断面1次モーメント)
\[
{\rm (3.1.3a)}
G_x = \iint_A dG_x = \iint_A ydxdy
\]
( $y$ 軸に関する断面1次モーメント)
\[
{\rm (3.1.3b)}
G_y = \iint_A dG_y = \iint_A xdxdy
\]
また,断面1次モーメントの単位は(長さ)の3乗となる.
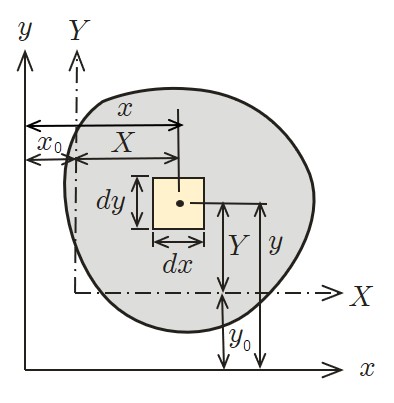
3.1.2 座標軸の平行移動
任意の直交座標軸に関する断面1次モーメントが既知の場合,この座標軸に平行な他の座標軸に関する断面1次モーメントを求めてみよう.
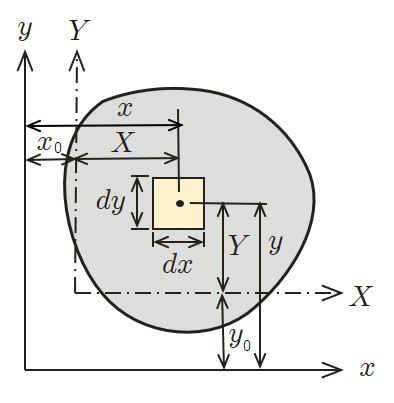
図3.1.2に示すよう,空間に固定された座標系 $(x-y)$ とそれに平行な座標系 $(X-Y)$ の2つの座標系を考える.
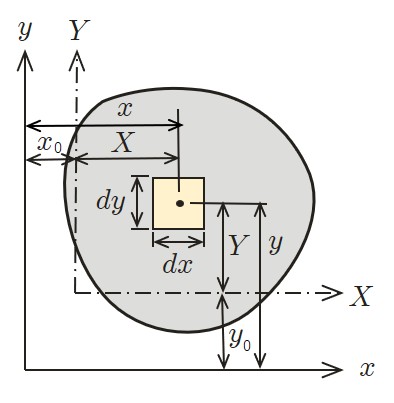
$\hspace{1em}$図3.1.2 座標軸の平行移動
このとき,2つの座標系の間には,次の関係が成立する.
\[
{\rm (3.1.4)}
\left.
\begin{array}{rcl}
x &=& x_0 + X \\
y &=& y_0 + Y
\end{array}
\right\}
\]
ここで,$(x_0, y_0)$ は座標系 $(X-Y)$ の座標系 $(x-y)$ に対する原点の移動量である.
座標系 $(X-Y)$ における $X$ 軸に関する断面1次モーメントは定義より,
\[
{\rm (3.1.5)}
G_X = \iint_A YdXdY
\]
と表される.また,微小面積 $dA$ は座標系に関係なく,
\[
dA = dxdy = dXdY
\]
であるため,
式(3.1.5)は
式(3.1.4)を用いて次のように計算することができる.
\[
G_X = \iint_A YdXdY
= \iint_A (y-y_0)dxdy
= \iint_A ydxdy - \iint_A y_0 dxdy
= G_x - y_0 A
\]
同様にして,Y軸に関する断面1次モーメントを求めると,平行移動後の座標系 $(X-Y)$ に関する断面1次モーメントは元の座標系 $(x-y)$ に関する断面1次モーメント $G_x$, $G_y$ と原点の移動量 $(x_0,y_0)$,断面積 $A$ を用いて以下のように計算できる.
\[
{\rm (3.1.6)}
\left.
\begin{array}{rcl}
G_X = G_x - y_0 A \\
G_Y = G_y - x_0 A
\end{array}
\right\}
\]
3.1.3 図心と重心
図心(centroid, center of figure)の定義は
1点を通る任意の直交軸に関して,それぞれの軸に関する断面1次モーメントが0である場合の位置
である.ここで,座標軸の平行移動の節で説明した断面1次モーメントの
式(3.1.6)を思い起こしてみよう.空間に固定された任意の座標系 $(x-y)$ に対し,平行移動後の座標系 $(X-Y)$ が図心を通ると考えると,図心の定義より,
\[
{\rm (3.1.7)}
\left.
\begin{array}{rcl}
G_X = G_x - y_0 A = 0 \\
G_Y = G_y - x_0 A = 0
\end{array}
\right\}
\]
となる.座標系 $(x-y)$ から見た座標系 $(X-Y)$ の位置は $(x_0, y_0)$ で表されるため,座標系 $(x-y)$ による図心位置は $(x_0, y_0)$ である.したがって,任意の座標系 $(x-y)$ に関する図心位置は
式(3.1.7)より以下のように求められる.
\[
{\rm (3.1.8)}
\left.
\begin{array}{rcl}
x_0 &=& \displaystyle \frac{G_y}{A}
= \frac{\iint_A x dxdy}{\iint_A dxdy} \\
y_0 &=& \displaystyle \frac{G_x}{A}
= \frac{\iint_A y dxdy}{\iint_A dxdy} \\
\end{array}
\right\}
\]
次に,図心と
重心(center of gravity)の関係について考えてみよう.図心は与えられた図形(断面)に対するもので,微小面積を考えているため,その密度(重さ)が場所によって異なっていたとしても関係がない.一方,密度 $\rho$ を考慮した微小部分のモーメントは
\[
{\rm (3.1.9)}
\left.
\begin{array}{rcl}
dM_x &=& y \times (\rho dA) \\
dM_y &=& x \times (\rho dA) \\
\end{array}
\right\}
\]
(3.1.9)
である.重心はこのモーメントを全断面について積分し,全重量で割ったものであるから,
\[
{\rm (3.1.10)}
\left.
\begin{array}{rcl}
x_0 &=& \displaystyle \frac{\iint_A (\rho x) dxdy}{\iint_A \rho dxdy} \\
y_0 &=& \displaystyle \frac{\iint_A (\rho y) dxdy}{\iint_A \rho dxdy} \\
\end{array}
\right\}
\]
となる.このように,重心と図心では密度の影響を考慮するかしないかの相違がある.もし,密度分布が断面のいたる所で一定であるならば,密度 $\rho$ は積分の外に出すことができるため,図心と重心は一致する.
3.1.4 計算例
例題3.1.1(矩形断面)
図3.1.3に示す長方形断面の $x$ 軸ならびに $X$ 軸,$Y$ 軸に関する断面1次モーメントを求めてみよう.
$\hspace{3em}$図3.1.3 矩形断面
( $x$ 軸に関する断面1次モーメント)
\[
G_x = \iint_A y dxdy
= \int_0^h \left( \int_{-b/2}^{b/2} ydx \right) dy
= \int_0^h (yb)dy
= \frac{b}{2} \left[ y^2 \right]_0^h
= \frac{bh^2}{2}
\]
( $X$ 軸に関する断面1次モーメント)
\[
G_X = \iint_A Y dXdY
= \int_{-h/2}^{h/2} \left( \int_{-b/2}^{b/2} Y dX \right) dY
= \int_{-h/2}^{h/2} (Yb)dY
= \frac{b}{2} \left[ Y^2 \right]_{-h/2}^{h/2}
= 0
\]
( $Y$ 軸に関する断面1次モーメント)
\[
G_Y = \iint_A X dXdY
= \int_{-b/2}^{b/2} \left(\int_{-h/2}^{h/2} X dY \right) dX
= \int_{-b/2}^{b/2} (Xh)dX
= \frac{h}{2} \left[ X^2 \right]_{-b/2}^{b/2}
= 0
\]
$G_X=G_Y=0$ であるから,$X$軸,$Y$軸が図心位置を通ることは定義より明かである.
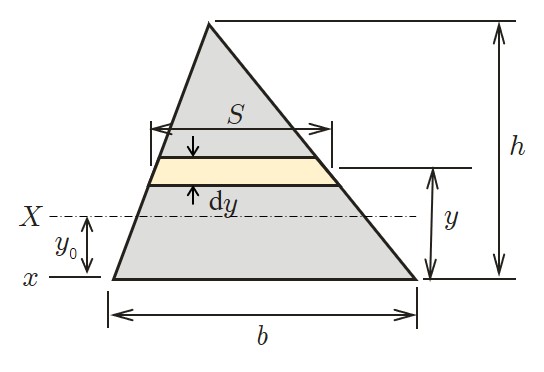
例題3.1.2(三角形断面)
図3.1.4に示す三角形の $x-x$ 軸に関する断面1次モーメントと図心位置 $y_0$ を求めてみよう.
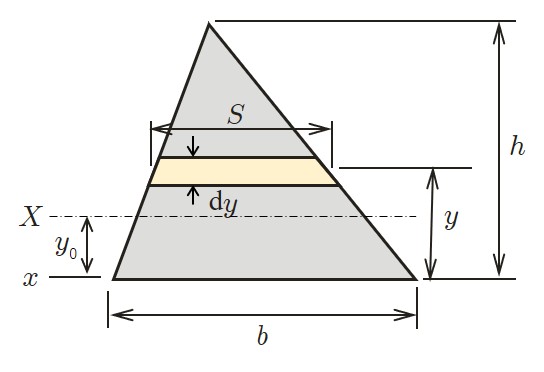 $\hspace{4em}$図3.1.4 三角形断面
図3.1.4
$\hspace{4em}$図3.1.4 三角形断面
図3.1.4に示す斜線部の微小面積 $dA$ は以下のように表される.
\[
dA = Sdy
\]
一方,$S$ は $S = b(h-y)/h$ と表せるため,
\[
dA = \frac{b(h-y)}{h} dy
\]
となる.以上より $x$ 軸に関する断面1次モーメントは
\[
G_x = \iint_A ydA
= \int_0^h (yS)dy
= \int_0^h \frac{by(h-y)}{h}dy
= \frac{b}{h} \left[ \frac{1}{2}hy^2 - \frac{1}{3} y^3 \right]_0^h
= \frac{bh^2}{6}
\]
となる.また,図心位置は以下のように求めることができる.
\[
y_0 = \frac{G_x}{A}
= \frac{ \displaystyle \frac{bh^2}{6}}{\displaystyle \frac{bh}{2}}
= \frac{h}{3}
\]
例題3.1.3(複雑な断面)
長方形や三角形から構成される複雑な図形の断面1次モーメントおよび図心位置 $y_0$ を求めてみよう.
図3.1.5の問題は
図3.1.6に示すよう2つの長方形断面より構成されている.
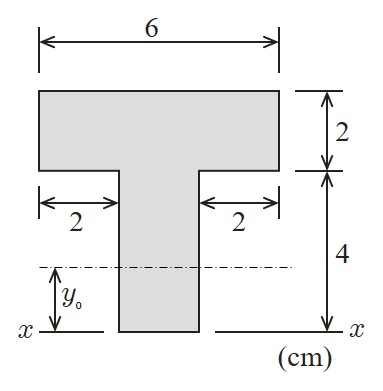
$\hspace{2em}$図3.1.5 複雑な断面
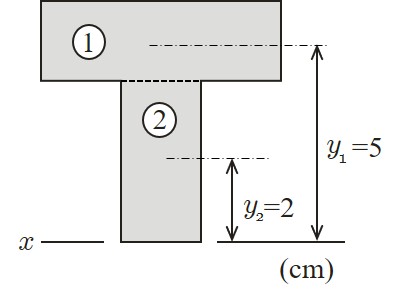
$\hspace{2em}$図3.1.6 断面の分割
この場合それぞれの図形における $x$ 軸に対する図心位置がわかっているため,以下のように計算できる.
\[
G_x = A_1 y_1 + A_2 y_2
\]
実際の計算では以下のように表を作成すると便利である.
| 断面番号 |
断面積$A({\rm cm^2})$ |
$y({\rm cm})$ |
$Ay({\rm cm^3})$ |
|---|
| ① |
$6 \times 2=12$ |
5 |
60 |
| ② |
$2 \times 4=8$ |
2 |
16 |
| $\sum$ |
20 |
- |
76 |
例題3.1.4(中空矩形断面)
穴の空いた断面に関する断面1次モーメントおよび図心の位置 $y_0$ を求めてみよう.
図3.1.7は長方形断面に長方形の穴が空いている場合である.
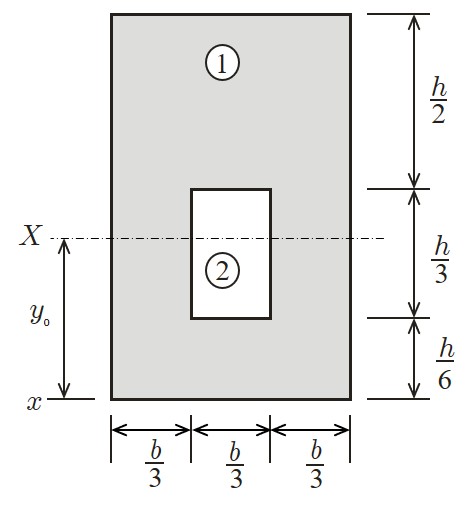
$\hspace{1em}$図3.1.7 中空矩形断面
このような断面の $x$ に関する断面1次モーメントは図中①で示す長方形中実断面の断面1次モーメントから②で示す穴の部分における断面1次モーメントを差し引けばよい.すなわち,
\[
G_x = G_{x1} - G_{x2}
= \frac{bh^2}{2} - \frac{bh}{9} \times \frac{h}{3}
= \frac{25}{54} bh
\]
一方,断面積 $A$ は
\[
A = bh - \frac{bh}{9}
= \frac{8}{9} bh
\]
より,図心位置 $y_0$ は以下のように求められる.
\[
y_0 = \frac{G_x}{A}
= \frac{\displaystyle \frac{25}{54}bh^2}{\displaystyle \frac{8}{9}bh}
= \frac{25}{48} h
\]
3.2.1 断断面2次モーメントの定義
図3.2.1に示すようなある形状の断面が与えられたとする.
 $\hspace{0em}$図3.2.1 断面2次モーメントの定義
$\hspace{0em}$図3.2.1 断面2次モーメントの定義
このとき,断面内の微小面積 $dA$ は断面1次モーメントと同様,以下のように与えられる.
\[
{\rm (3.2.1)}
dA = dxdy
\]
このとき,微小面積に対する
断面2次モーメント(geometrical moment of inertia)は,
( $x$ 軸に関する断面2次モーメント)
\[
{\rm (3.2.2a)}
dI_x = y^2dA = y^2dxdy
\]
( $y$ 軸に関する断面2次モーメント)
\[
{\rm (3.2.2b)}
dI_y = x^2dA = x^2dxdy
\]
と定義される.断面1次モーメントが微小面積 $dA$ に $x$,あるいは $y$ を掛けたものであるのに対し,$x$ および $y$ の2乗を掛けていることから断面2次モーメントと呼ばれている.
全断面についてこの断面2次モーメントを求めると次のようになる.
( $x$ 軸に関する断面2次モーメント)
\[
{\rm (3.2.3a)}
I_x = \iint_A dI_x
= \iint_A y^2 dxdy
\]
( $y$ 軸に関する断面2次モーメント)
\[
{\rm (3.2.3b)}
I_y = \iint_A dI_y
= \iint_A x^2 dxdy
\]
この断面2次モーメントの単位は(長さ)の4乗であり,曲げモーメントによって断面に生じる応力度を計算したり,たわみの計算に利用される.
3.2.2 座標軸の平行移動
断面1次モーメントと同様,任意の直交座標軸に関する断面2次モーメントが既知の場合,この座標軸に平行な他の座標軸に関する断面1次モーメントを求めてみよう.
図3.2.2に示すよう,空間に固定された座標系 $(x-y)$ とそれに平行な座標系 $(X-Y)$ の2つの座標系の間に次の関係が成立している.
 $\hspace{1em}$図3.2.2 座標軸の平行移動
$\hspace{1em}$図3.2.2 座標軸の平行移動
\[
{\rm (3.2.4)}
\left.
\begin{array}{rcl}
x &=& x_0 + X \\
y &=& y_0 + Y
\end{array}
\right\}
\]
微小部分の面積 $dA$ は座標系に関係なく,
\[
dA = dxdy = dXdY
\]
であるため,先の全断面に対する断面2次モーメントの定義式より,固定された座標系 $(x-y)$ に関する断面2次モーメント $I_x$ は平行移動後の座標系 $(X-Y)$ に関する断面2次モーメント $I_X$ および断面1次モーメント $G_X$ と平行移動量 $(x_0, y_0)$,断面積 $A$ を用いて以下のように表せる.
\[
{\rm (3.2.5)}
\begin{array}{rcl}
I_x &=& \displaystyle \iint_A y^2 dxdy \\
&=& \displaystyle \iint_A (y_0+Y)^2 dXdY \\
&=& \displaystyle \iint_A Y^2 dXdY + 2y_0 \iint YdXdY + y_0^2 \iint_A dXdY \\
&=& \displaystyle I_X + 2y_0 G_X + y_0^2 A
\end{array}
\]
同様にして,$y$ 軸に関する断面2次モーメントの関係を求めると,
\[
{\rm (3.2.6)}
I_y = I_Y + 2x_0 G_Y + x_0^2 A
\]
となる.
式(3.2.5),
式(3.2.6)では $(X-Y)$ 軸を任意に考えていた.もし, $(X-Y)$ 軸の原点が断面の図心位置と一致していた場合は,図心の定義より,
\[
G_X = G_Y = 0
\]
であるため,
式(3.2.5),
式(3.2.6)は以下のようになる.
\[
{\rm (3.2.7)}
\left.
\begin{array}{rcl}
I_x &=& I_X + y_0^2 A \\
I_y &=& I_Y + x_0^2 A
\end{array}
\right\}
\]
断面2次モーメントの値は基準として考えている座標系によりその値が異なるため,応力度計算などに利用する場合は図心軸に関する値を用いる.そこで,
式(3.2.7)を図心に関する断面2次モーメントの式に変更しておく.
\[
{\rm (3.2.8)}
\left.
\begin{array}{rcl}
I_X &=& I_x - y_0^2 A \\
I_Y &=& I_y - x_0^2 A
\end{array}
\right\}
\]
3.2.3 計算例
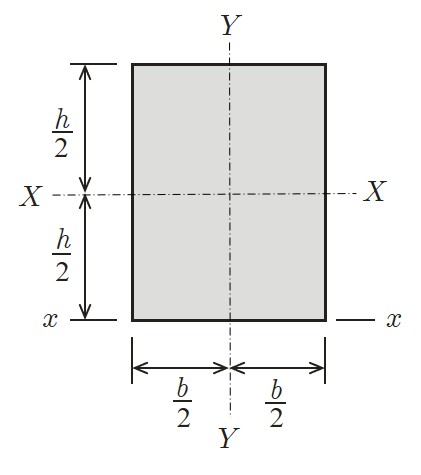
例題3.2.1(長方形断面)
図3.2.3に示す長方形断面において,$(X-X)$ 軸ならびに $(Y-Y)$ 軸は図心を通るものとする.このとき,図心に関する断面2次モーメントは以下のように計算することができる.
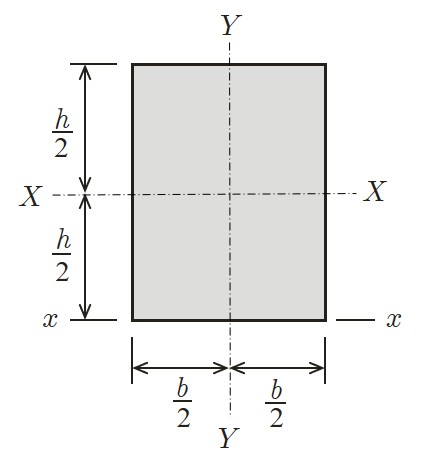 $\hspace{2em}$図3.2.3 長方形断面
( $X$ 軸に関する断面2次モーメント)
$\hspace{2em}$図3.2.3 長方形断面
( $X$ 軸に関する断面2次モーメント)
\[
I_X = \iint_A Y^2 dXdY
= \int_{-h/2}^{h/2} Y^2 \left( \int_{-b/2}^{b/2} dX \right) dY
= \int_{-h/2}^{h/2} (Y^2b) dY
= \frac{b}{3} \left[ y^3 \right]_{-h/2}^{h/2}
= \frac{bh^3}{12}
\]
( $Y$ 軸に関する断面2次モーメント)
\[
I_Y = \iint_A X^2 dXdY
= \int_{-h/2}^{h/2} \left( \int_{-b/2}^{b/2} X^2 dX \right) dY
= \frac{b^3h}{12}
\]
\[
{\rm (3.2.9)}
\left.
\begin{array}{rcl}
I_X = \displaystyle \frac{bh^3}{12} \\
I_Y = \displaystyle \frac{b^3h}{12}
\end{array}
\right\}
\]
例題3.2.2(三角形断面)
図3.2.4に示す三角形断面において,$(X-X)$ 軸を図心を通る軸と考え,図心に関する断面2次モーメントを求める.
 $\hspace{2em}$図3.2.4 三角形断面
$\hspace{2em}$図3.2.4 三角形断面
ここでは,まず,$(x-x)$ 軸に関する断面2次モーメントを求め,それを利用して図心軸に関する断面2次モーメントを求めてみよう.いま,図の斜線で示す微小面積の幅 $S$ は
\[
S = \frac{b(h-y)}{h}
\]
と表わされる.また,微小面積 $dA$ は,$dA = Sdy$ であるから,$(x-x)$ 軸に関する断面2次モーメントは以下のように計算することができる.
\[
I_x = \iint_A y^2 dA
= \int_0^h\left( y^2 \right) dy
= \int_0^h \frac{by^2(h-y)}{h} dy
= \frac{bh^3}{12}
\]
したがって,図心に関する断面2次モーメント $I_X$ は
\[
{\rm (3.2.9)}
I_X = I_x - y_0^2 A
= \frac{bh^3}{12} - \left( \frac{h}{2} \right)^2 \times \frac{1}{2} bh
= \frac{bh^3}{36}
\]
\[
\hspace{5em}
\left(
\because
y_0 = \frac{G_x}{A}
= \frac{h}{3}
\right)
\]
例題3.2.3(円形断面)
図3.2.5に示す円形断面の図心位置に関する断面2次モーメントを求めてみよう.
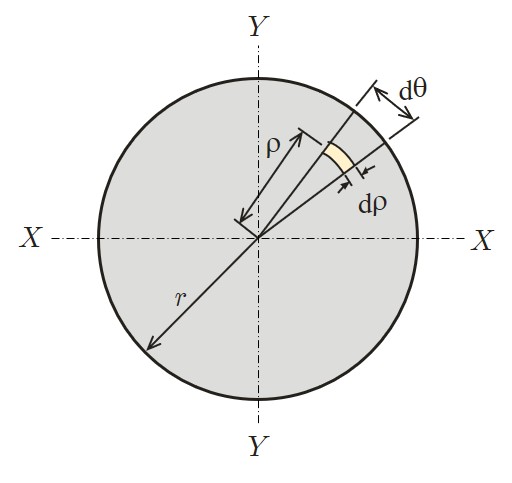 $\hspace{4em}$図3.2.5 円形断面
$\hspace{4em}$図3.2.5 円形断面
\[
I_X = I_Y
\]
であることは明かであるため,ここでは $I_X$ のみ求める.
図3.2.5における斜線で示した微小面積 $dA$ は
\[
dA = ( \rho d \theta ) \times d \rho
\]
である.一方,$Y$ は $\rho$ と $\theta$ により
\[
Y = \rho \sin \theta
\]
と表される.したがって,断面2次モーメントは
\[
I_X = \iint_A Y^2 dA
= \iint_A ( \rho \sin \theta)^2 \rho d \theta d \rho
= \int_0^r \left( \int_0^{2 \pi} \rho^3 \sin^2 \theta d \theta \right) d \rho
= \frac{1}{4} \pi r^4
\]
と計算できる.円の直径を $D$ とするなら,断面2次モーメントは以下のようになる.
\[
{\rm (3.2.11)}
I_X = \frac{\pi}{4}r^4 = \frac{\pi}{64}D^4
\]
例題3.2.4(図心位置が同じ長方形中空断面)
図3.2.6に示す内部の中空部と外部の断面の図心軸が一致している場合の断面2次モーメントは以下のように簡単にを求めることができる.
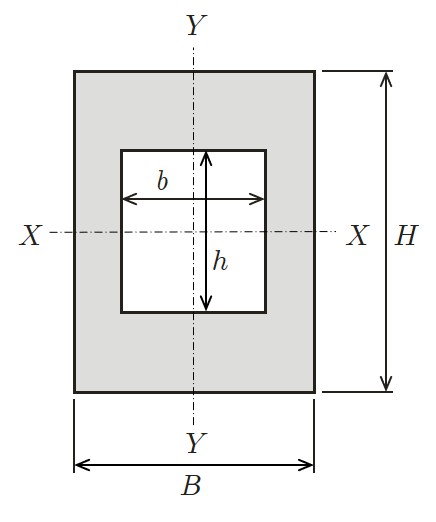 $\hspace{1em}$図3.2.6 長方形中空断面
$\hspace{1em}$図3.2.6 長方形中空断面
\[
\left.
\begin{array}{rcl}
I_X &=& \displaystyle \frac{BH^3}{12} - \frac{bh^3}{12} \\
I_Y &=& \displaystyle \frac{B^3H}{12} - \frac{b^3h}{12}
\end{array}
\right\}
\]
例題3.2.5(非対称I型断面)
いくつかの基本図形から構成される一般的な断面の断面2次モーメントを求めてみよう.例として
図3.2.7に示す非対称I型断面を考える.
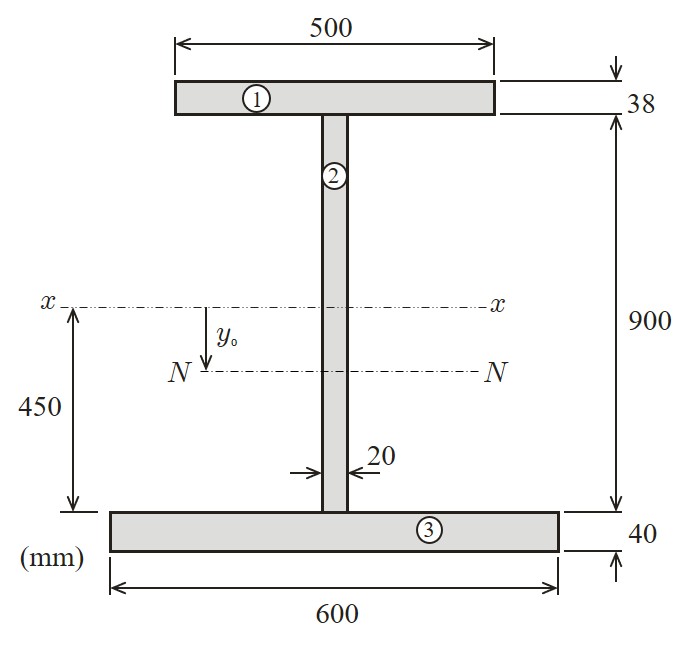 $\hspace{2em}$図3.2.7 非対称I型断面
$\hspace{2em}$図3.2.7 非対称I型断面
図中,$(N-N)$ は図心軸を,また,$(x-x)$ 軸はウェブ中心位置に設けた座標軸を表している.
初めに断面を図の①②③のように基本断面に分割する.分割されたそれぞれの断面に対し,必要な計算を以下に示す表を用いて行うと計算ミスを防ぎやすい.この表で,最後の $I_0$ は分割されたそれぞれの基本断面の図心軸に関する断面2次モーメントである.
| 断面番号 |
断面積$A({\rm cm^2})$ |
$y({\rm cm})$ |
$Ay({\rm cm^3})$ |
$Ay^2({\rm cm^4})$ |
$I_0({\rm cm^4})$ |
|---|
| ① |
$500 \times 38=190$ |
$46.9$ |
$8911$ |
$417926$ |
$229$ |
| ② |
$900 \times 20=180$ |
$0.0$ |
$0$ |
$0$ |
$121500$ |
| ③ |
$600 \times 40=240$ |
$-47.0$ |
$-11280$ |
$530160$ |
$320$ |
| $\sum$ |
610 |
- |
$-2369$ |
$948086$ |
$122049$ |
表より,$(x-x)$ 軸からの中立軸 $(N-N)$ の位置は
\[
y_0 = \frac{\sum A_iy_i}{\sum A_i}
= \frac{-2369}{610}
= -3.88 \; {\rm cm}
\]
と求められる.一方,図心軸 $(N-N)$ に関する断面2次モーメントは
\[
I_N = I_x - y_0^2 A
\]
で計算できるが,$I_x$ が,
式(3.2.7)より
\[
I_x = \sum y_i^2 A_i +\sum I_{O_i}
\]
であるため,図心軸に関する断面2次モーメントが以下のように求まる.
\[
I_N = \sum y_i^2 A_i + \sum I_{O_i} - y_0^2 A
= 948086 + 122049 - (-3.88)^2 \times 610
= 1060591
\]
\[
\hspace{2em} \therefore \;\; I_N = 1060951 \; {\rm cm^4}
\]
3.3.1 断面係数
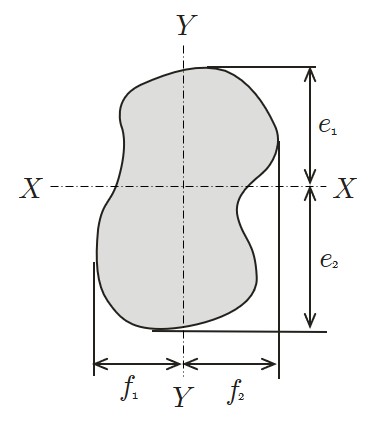
図3.3.1に示す任意形状の断面が与えられたとする.ただし,図中の $(X-X)$ ならびに $(Y-Y)$ 軸は図心軸である.
 $\hspace{2em}$図3.3.1 断面係数
$\hspace{2em}$図3.3.1 断面係数
このとき,重心を通る軸に関する断面2次モーメントをその軸から最両端までの距離 $e_1$, $e$2 あるいは $f_1$, $f_2$ で除した商をその軸に関する
断面係数(section modulus)と呼び $W$ で表す.
( $X$ 軸に関する断面係数)
\[
{\rm (3.3.1)}
\left.
\begin{array}{rcl}
W_{X1} &=& \displaystyle \frac{I_X}{e_1} \\
W_{X2} &=& \displaystyle \frac{I_X}{e_2}
\end{array}
\right\}
\]
( $Y$ 軸に関する断面係数)
\[
{\rm (3.3.2)}
\left.
\begin{array}{rcl}
W_{Y1} &=& \displaystyle \frac{I_Y}{f_1} \\
W_{Y2} &=& \displaystyle \frac{I_Y}{f_2}
\end{array}
\right\}
\]
式(3.3.1),
式(3.3.2)からも理解できるように,断面係数の単位は(長さ)の3乗である.
断面係数は,
式(3.3.3)で表されるような,曲げモーメント $(M)$ により断面に生ずる応力度 $(\sigma)$ を計算するときに利用される.(このことに関する詳細は,別の章において説明する)
\[
{\rm (3.3.3)}
\sigma = \frac{M}{I} y
\]
ここで,$I$ は図心軸における断面2次モーメントであり,$y$ は
図3.3.2に示すよう,図心軸から応力度を求めたい位置までの距離である.
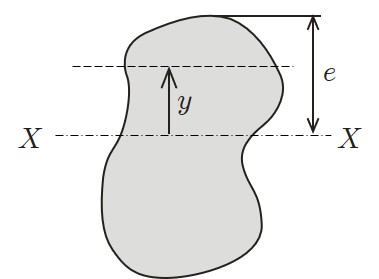
$\hspace{1em}$図3.3.2 図心軸からの距離
このとき,応力度が最大(最小)となるのは断面の外縁 $(e)$ であるから,
式(3.3.3)は次のように書くことができる.
\[
{\rm (3.3.4)}
\sigma = \frac{M}{I} e
= \frac{M}{\displaystyle \frac{I}{e}}
= \frac{M}{W}
\]
式(3.3.4)は,曲げモーメントを断面係数で割ることにより応力度を求めることができることを示している.
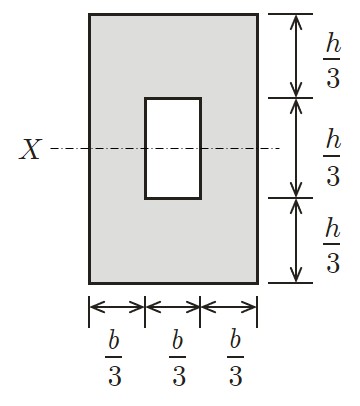
例題3.3.1(長方形中空断面)
図3.3.3に示す長方形中空断面の断面係数を求めてみよう.
 $\hspace{0em}$図3.3.3 中空長方形断面
$\hspace{0em}$図3.3.3 中空長方形断面
$X$ 軸は中立軸であるとすると,$X$ 軸に関する断面2次モーメント $I_X$ は
\[
I_X = \frac{bh^3}{12}
- \frac{\displaystyle \left( \frac{b}{3} \right) \left( \frac{h}{3} \right)^3}{12}
= \frac{20}{243} bh^3
\]
一方,中立軸から外縁までの距離 $e_1$, $e_2$ は
\[
e_1 = e_2 = \frac{h}{2}
\]
であるから,断面係数は以下のように計算される.
\[
W_{X1} = W_{X2}
= \frac{I_X}{e_1}
= \frac{I_X}{e_2}
= \frac{\displaystyle \frac{20}{243}bh^3}
{\displaystyle \frac{h}{2}}
= \displaystyle \frac{40}{243} bh^2
\]
3.3.2 断面相乗モーメント(慣性相乗モーメント)
後述する断面の主軸を求めるためには
断面相乗モーメント (product of inertia of area) を定義しておく必要がある.ここでは,この断面相乗モーメントについて考えてみよう.
図3.3.4に示すようなある形状の断面を考える.
 $\hspace{0em}$図3.3.4 断面相乗モーメントの定義
$\hspace{0em}$図3.3.4 断面相乗モーメントの定義
このとき,断面内の微小面積 $dA$ は次のようになる.
\[
{\rm (3.3.5)}
dA = dxdy
\]
と与えられる.いま,この微小面積に対する断面相乗モーメントを次のように定義する.
\[
{\rm (3.3.6)}
dI_{xy} = xydA = xydxdy
\]
したがって,断面全体に対する断面相乗モーメントは次のようになる.
\[
{\rm (3.3.7)}
I_{xy} = \iint_A I_{xy} = \iint_A xydxdy
\]
これまでと同様,次に座標軸の平行移動について考えてみよう.
図3.3.5に示す空間に固定された座標系 $(x-y)$ と平行移動後の座標系 $(X-Y)$ の間には次の関係が成立している.
\[
{\rm (3.3.8)}
\left.
\begin{array}{rcl}
x &=& x_0 + X \\
y &=& y_0 + Y
\end{array}
\right\}
\]
 $\hspace{1em}$図3.3.5 座標軸の平行移動
$\hspace{1em}$図3.3.5 座標軸の平行移動
そこで,座標系 $(x-y)$ の断面相乗モーメントを座標系 $(X-Y)$ により表すことを考えてみよう.いま,断面内の微小面積 $dA$ は座標系に関係なく $dA = dxdy = dXdY$ であるため,
\[
{\rm (3.3.9)}
\begin{array}{rcl}
I_{xy} &=& \displaystyle
\iint_A xy dxdy = \iint_A (x_0+X)(y_0+Y) dXdY \\
&=& \displaystyle
\iint_A XY dXdY+x_0 \iint_A YdXdY+y_0 \iint X dXdY + x_0y_0 \iint_A dXdY \\
&=& \displaystyle
I_{XY} + x_0 G_X + y_0 G_Y + x_0y_0 A
\end{array}
\]
となる.特に,座標軸 $(X-Y)$ の原点が図心位置と一致するなら
\[
G_X = G_Y = 0
\]
となるから,
式(3.3.9)は以下のようになる.
\[
{\rm (3.3.10)}
I_{xy} = I_{XY} + x_0 y_0 A
\]
例題3.3.2(L型断面)
簡単な例題として,
図3.3.6に示すL型断面の断面相乗モーメントを求めてみよう.
 $\hspace{2em}$図3.3.6 L型断面
$\hspace{2em}$図3.3.6 L型断面
図において $(X-Y)$ 軸は断面全体の図心を通る軸であり,$(x-y)$ 軸は分割した①②の各断面の図心を通る軸である.このとき,図心軸 $(X-Y)$ に関する断面相乗モーメントを計算するにあたり,これまでと同様,計算ミスを極力防ぐため表を利用する.
| 断面番号 |
断面積$A({\rm cm^2})$ |
$x({\rm cm})$ |
$y({\rm cm})$ |
$Ax({\rm cm^3})$ |
$Ay({\rm cm^3})$ |
$A_{xy}({\rm cm^4})$ |
|---|
| ① |
$60 \times 6=360$ |
$0.0$ |
$27.0$ |
$0$ |
$9720$ |
$0$ |
| ② |
$34 \times 6=204$ |
$20.0$ |
$0.0$ |
$4080$ |
$0$ |
$0$ |
| $\sum$ |
564 |
- |
- |
$4080$ |
$9720$ |
$0$ |
したがって,図心位置は次のようになる.
\[
x_0 = \frac{G_y}{A}
= \frac{\sum x_i A_i}{\sum A_i}
= \frac{4080}{564}
= 7.23 \; {\rm cm}
\]
\[
y_0 = \frac{G_x}{A}
= \frac{\sum y_i A_i}{\sum A_i}
= \frac{9720}{564}
= 17.23 \; {\rm cm}
\]
一方,図心位置に関する断面相乗モーメント $I_{XY}$ は次のように計算できる.
\[
I_{XY} = I_{xy} - x_0 y_0 A
\]
ところが,$I_{xy}$ は $(x-y)$ 軸のどちらかがそれぞれの断面の図心位置を通るため,
\[
I_{xy} = I_{oXY} + x_0 y_0 A
= \sum x_i y_i A_i + \sum I_{oXY_i}
= 0
\]
となり,結局,図心位置の断面相乗モーメントは以下のように求められる.
\[
I_{XY} = - x_0 y_0 A
= -7.23 \times 17.23 \times 564
= -70259
\]
\[
\hspace{2em} \therefore \;\; I_{XY} = -70259 \; {\rm cm^4}
\]
3.3.3 断面2次極モーメント(慣性極モーメント)
断面2次極モーメント(polar moment of inertia of area)は後述の断面2次半径を求めるために用いられる.
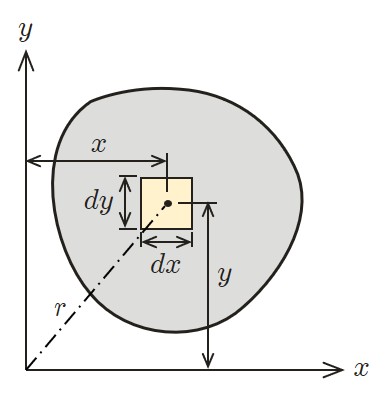
図3.3.7に示す任意の断面を考えてみよう.
 $\hspace{0em}$図3.3.7 断面2次極モーメントの定義
$\hspace{0em}$図3.3.7 断面2次極モーメントの定義
このとき微小面積 $dA = dxdy$ に関する断面2次極モーメントは以下のように定義される.
\[
{\rm (3.3.11)}
dI_p = r^2dA = (x^2+y^2)dxdy
\]
したがって,全断面に関する断面2次極モーメントは次のようになる.
\[
{\rm (3.3.12)}
dI_p = \iint_A dI_p
= \iint_A r^2dxdy
= \iint_A (x^2+y^2) dxdy
= \iint_A x^2 dxdy + \iint_A y^2 dxdy
\]
例題3.3.3(円形断面)
計算例として
図3.3.8に示す円形断面の断面2次極モーメントを求めてみよう.
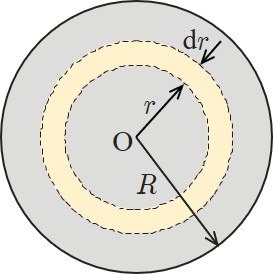
$\hspace{1em}$図3.3.8 円形断面
図を参照すると斜線で示した微小面積 $dA$ は次のように計算される.
\[
dA = d(\pi r^2) = (2 \pi r) dr
\]
したがって,断面2次極モーメントは次のようになる.
\[
I_p = \iint_A r^2 dA
= \int ( r^2 \times 2 \pi r ) dr
= \frac{\pi}{2}R^4
\]
一方,$I_P = I_x + I_y$ であり,$(x-y)$ 軸が図心軸と一致していれば $(I_x = I_y)$となるため
\[
I_p = I_x + I_y = \frac{\pi}{4}R^4 + \frac{\pi}{4}R^4 = \frac{\pi}{2}R^4
\]
と計算することができる.
3.3.4 断面2次半径(回転半径)
断面2次半径 (radius of gyration of area) は圧縮を受ける部材の座屈などを議論するときに用いられる.これは,断面2次モーメントを断面積で除した商の平方根で表し,通常,$r$ という記号が用いられる.
断面2次半径には断面2次モーメントの考え方により以下の3つがある.
\[
{\rm (3.3.13)}
r_x = \sqrt{\frac{I_x}{A}}
\hspace{2em}
r_y = \sqrt{\frac{I_y}{A}}
\hspace{2em}
r_p = \sqrt{\frac{I_p}{A}}
\hspace{2em}
\]
例えば,$x$ 軸に関する断面2次極モーメントの式を変形すると,
\[
{\rm (3.3.14)}
I_x = r_x^2 \times A
\]
なる関係が得られる.すなわち,$x$ 軸に関する断面2次モーメント $I_x$ は,$x$ 軸から $r$ だけはなれた位置に断面積 $A$ が集中していると考え,それによって求めた断面2次モーメントと等しいことを意味する.同様なことが他の軸についてもいえる.
例題3.3.4(円環断面)
計算例として
図3.3.9に示す円形中空断面の断面2次半径を求めてみよう.
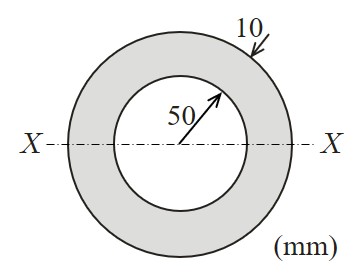
$\hspace{2em}$図3.3.9 円環断面
中立軸 $X$ に関する断面2次モーメントは以下のように計算できる.
\[
I_x = \frac{\pi}{4} 6^4 - \frac{\pi}{4} 5^4
= 527 \; {\rm cm^4}
\]
また,断面積は $A=34.5cm^2$ であるから,$X$ 軸に関する断面2次半径 $r_x$ は以下のように求められる.
\[
r_x = \sqrt{\frac{I_x}{A}}
= \sqrt{527}{34.5}
= 3.9 \; {\rm cm}
\]
一方,断面2次極モーメント $I_p$ が
\[
I_p = I_x + I_y
= 2I_x
= 1054 \; {\rm cm^4}
\]
であるため,$r_p$ は以下のように求まる.
\[
r_p = \sqrt{\frac{I_p}{A}}
= \sqrt{\frac{1054}{34.5}}
= 5.53 \; {\rm cm}
\]
3.4.1 座標軸の回転
単純な断面の場合,どの方向が応力度に対して有利であるか,不利であるかは簡単に理解することができる.ところが,複雑な断面になると直感的に有利な方向を見つけ出すことは困難になる.どのように大断面の材料を使用しても使い方を,すなわち,配置方法を誤れば強度は上がらない.経済的で強度の高い断面形状の材料を利用するためには,その断面にとってどの方向が有利で,どの方向が不利になるかを理解しておく必要がある.
そのためには,原点を共有する2組の座標系を考え,固定された座標系 $(x-y)$ と $\alpha$ だけ回転した座標系 $(X-Y)$ との関係を調べておく必要がある.
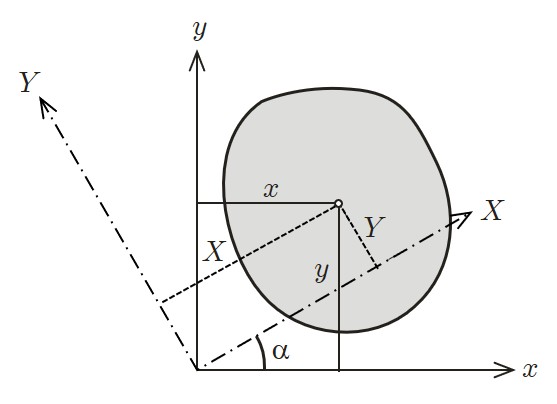 $\hspace{6em}$図3.4.1 座標軸の回転
図3.4.1
$\hspace{6em}$図3.4.1 座標軸の回転
図3.4.1を参照すると2つの座標系の間には次の関係が成立している.
\[
{\rm (3.4.1)}
\left.
\begin{array}{rcr}
X &=& x \cos \alpha + y \sin \alpha \\
Y &=& -x \sin \alpha + y \cos \alpha
\end{array}
\right\}
\]
式(3.4.1)のことを
座標変換の公式と呼んでいる.この座標変換の公式を用いて座標系 $(X-Y)$ の断面2次モーメントを座標系 $(x-y)$ の断面諸量により表してみよう.
\[
\begin{array}{rcl}
I_X &=& \displaystyle \iint_A Y^2 dA
= \iint_A (-x \sin \alpha + y \cos \alpha)^2 dA \\
&=& \displaystyle \iint_A x^2 dA \sin^2 \alpha
- 2 \iint_A xydA \sin\alpha \cos \alpha
+ \iint_A y^2 dA \cos^2 alpha \\
&=& \displaystyle
I_y \sin^2 \alpha - 2 I_{xy} \sin \alpha \cos \alpha + I_x \cos^2 \alpha
\end{array}
\]
同様にして,$Y$ 軸に関する断面2次モーメント $I_Y$, 断面相乗モーメント $I_{XY}$ を求めると以下のようになる.
\[
{\rm (3.4.2)}
\left.
\begin{array}{rcl}
I_X &=& I_y \sin^2 \alpha - 2 I_{xy} \sin \alpha \cos \alpha + I_x \cos^2 \alpha \\
I_Y &=& I_y \cos^2 \alpha + 2 I_{xy} \sin \alpha \cos \alpha + I_x \sin^2 \alpha \\
I_{XY} &=& (I_x-I_y)\sin \alpha \cos \alpha + I_{xy} (\cos^2 \alpha-\sin^2 \alpha)
\end{array}
\right\}
\]
なお,$(X-Y)$ 軸における断面2次極モーメント $I_p$ は,
式(1.4.2)より
\[
{\rm (3.4.3)}
I_p = I_x + I_y = I_X + I_Y = 一定
\]
なる関係にある.このように,座標軸の回転前および回転後の2組の直交座標系に関する断面2次モーメントの和は一定となる.
3.4.2 断面の主軸
式(3.4.2)に示したように,$I_X$, $I_Y$, $I_{XY}$ は $\alpha$ の関数となっている.したがって,$\alpha$ の値により回転前の断面2次モーメントおよび断面相乗モーメントと回転後のそれらの値は異なる.このように,角度 $\alpha$ のうち断面2次モーメントが極大あるいは極小となる角度が存在する.この角度を持つ座標軸のことを
主軸(principal axis)と呼ぶ.
もし,回転後の座標軸 $(X-Y)$ が主軸であるなら,その断面における断面2次モーメント $I_X$ を $\alpha$ で微分した値は極値となるため,以下の関係が成立する.
\[
{\rm (3.4.4)}
\frac{dI_x}{d \alpha} = 2 I_x \cos \alpha \sin \alpha
+ 2 I_y \sin \alpha \cos \alpha
- 2 I_{xy} \cos 2 \alpha
= 0
\]
したがって,主軸の方向 $\alpha$ は次のように求めることができる.
\[
{\rm (3.4.5)}
\alpha = \frac{1}{2} \tan^{-1} \left( \frac{-2I_{xy}}{I_x-I_y}\right)
\]
このことは,
式(3.4.2)において,$I_{XY} = 0$ として求めることができる.すなわち,
主軸において断面相乗モーメント $I_{XY}$ は0となる.
式(3.4.5)を
式(3.4.2)に代入すれば,主軸における断面2次モーメント $I_1$, $I_2$ が
式(3.4.6)のように求められる.これを
主断面2次モーメント(principal moment of inertia)と呼んでいる.ただし,$I_1$ は最大断面2次モーメントを,また,$I_2$ は最小断面2次モーメントを表している.
\[
{\rm (3.4.6)}
\left.
\begin{array}{c}
I_1 \\
I_2
\end{array}
\right\}
=
\frac{1}{2} (I_x + I_y)
\pm \sqrt{\left( \frac{I_x - I_y}{2} \right)^2+ I^2_{xy}}
\]
式(3.4.3)と同様,主軸における断面2次モーメントの和は以下のように一定となる.
\[
{\rm (3.4.7)}
I_1 + I_2 = I_x + I_y = 一定
\]
3.4.3 計算例
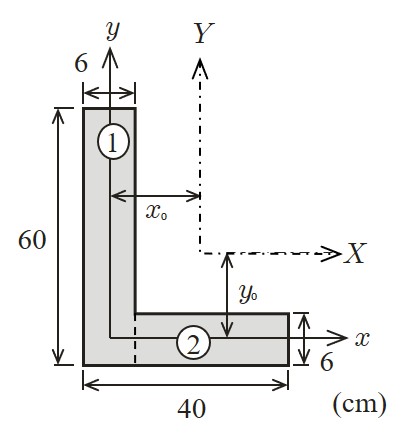
例題3.4.1(L型断面)
図3.4.2に示したL型断面の主軸方向および主断面2次モーメントを求めてみよう.
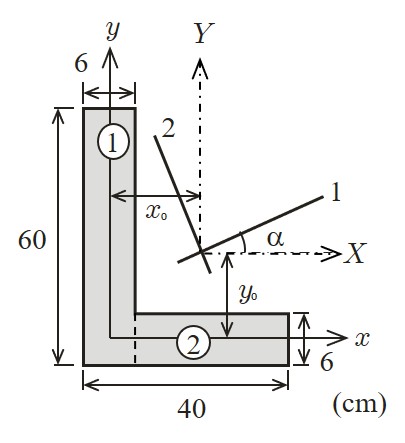 $\hspace{2em}$図3.4.2 L型断面
$\hspace{2em}$図3.4.2 L型断面
初めに図心位置 $(x_0, y_0)$ を求め,その図心位置と原点が一致する座標系 $(X-Y)$ に関する断面諸量を求める.計算にあたり,L型断面を2つの長方形断面①②に分割する.また,計算ミスを防ぐ意味でも,これまでと同様,表を用いて計算する.
| 断面番号 |
断面積$A({\rm cm^2})$ |
$x({\rm cm})$ |
$y({\rm cm})$ |
|---|
| ① |
$60 \times 6=360$ |
$0.0$ |
$27.0$ |
| ② |
$34 \times 6=204$ |
$20.0$ |
$0.0$ |
| $\sum$ |
564 |
- |
- |
| $Ax({\rm cm^3})$ |
$Ay({\rm cm^3})$ |
$Ax^2({\rm cm^4})$ |
$Ay^2({\rm cm^4})$ |
$I_{oX}({\rm cm^4})$ |
$I_{oY}({\rm cm^4})$ |
| $0$ |
$9720$ |
$9720$ |
$0$ |
$108000$ |
$20732$ |
| $4080$ |
$0$ |
$81600$ |
$0$ |
$612$ |
$19652$ |
| $4080$ |
$9720$ |
$81600$ |
$262440$ |
$108612$ |
$20732$ |
表より,図心位置は以下のように得られる.
\[
x_0 = \frac{\sum x_i A_i}{\sum A_i}
= \frac{4080}{564}
= 7.23 \; {\rm cm}
\]
\[
y_0 = \frac{\sum y_i A_i}{\sum A_i}
= \frac{9720}{564}
= 17.23 \; {\rm cm}
\]
図心に関する断面2次モーメントおよび断面相乗モーメントは以下のようになる.
\[
I_X = \sum y_i^2 A_i + \sum I_{oXi} - y_0^2 A
= 262440 + 108612 - 17.23^2 \times 564
= 203615 \; {\rm cm^4}
\]
\[
I_Y = \sum x_i^2 A_i + \sum I_{oYi} - x_0^2 A
= 81600 + 20732 - 7.23^2 \times 564
= 72850 \; {\rm cm^4}
\]
\[
I_{XY} = - x_0 y_0 A
= -7.23 \times 16.23 \times 564
= 70259 \; {\rm cm^4}
\]
一方,主軸方向は次のように求められる.
\[
\tan 2 \alpha = - \frac{2I_{XY}}{I_X-I_Y}
= \frac{2 \times 70259}{203615-72850}
= 1.0746
\]
\[
\hspace{3em} \alpha = 23^{\circ}32'
\]
以上より主断面2次モーメントは以下のように求められる.
\[
\left.
\begin{array}{c}
I_1 \\
I_2
\end{array}
\right\}
=
\frac{1}{2} (I_X + I_Y)
\pm \sqrt{\left( \frac{I_X - I_Y}{2} \right)^2+ I^2_{XY}}
\]
\[
\hspace{2em}
=
\frac{1}{2} (203615 + 72850)
\pm \sqrt{\left( \frac{203615 - 72850}{2} \right)^2+ 70259^2}
=
\]
\[
\hspace{2em}
=
\left\{
\begin{array}{r}
234208 \; {\rm cm^4} \\
42257 \; {\rm cm^4}
\end{array}
\right.
\]