2.材料の力学
- 2-1 棒材の引張と圧縮
- 2-1-1 応力とひずみの定義
- 2-1-2 応力ひずみ関係
- 2-1-3 フックの法則と弾性係数
- 2-1-4 ポアソン比
- 2-1-5 単一部材の引張と圧縮
- 2-2 組合わせ構造
- 2-2-1 段付き棒
- 2-2-2 異なる材料を組合わせた棒
- 2-2-3 棒が平行に並んだ構造
- 2-2-4 簡単なトラス構造
- 2-3 せん断応力
- 2-3-1 せん断応力の定義
- 2-3-2 継手のせん断応力
- 2-3-3 せん断応力と軸応力
- 2-4 棒材のねじり
- 2-4-1 丸棒のねじり
- 2-4-2 中空丸棒のねじり
- 2-4-3 その他の断面のねじり
- 2-5 組合せ応力と平面問題
- 2-5-1 任意断面の応力<
- 2-5-2 組合せ応力
- 2-5-3 主応力
- 2-5-4 モールの応力円
- 2-5-5 単純せん断
- 2-5-6 応力の座標変換
- 2-5-7 フックの法則の拡張
- 2-5-8 主ひずみとモールのひずみ円
2.1 棒材の引張と圧縮
物体に作用する外部からの力を
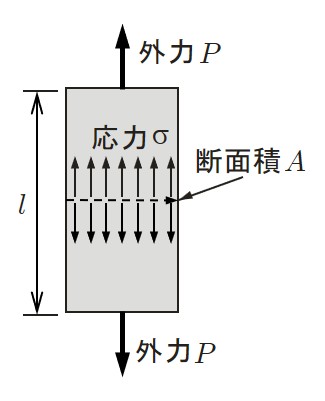
一様な断面積 $A$ を持つ棒に引張荷重 $P$ が作用すると,
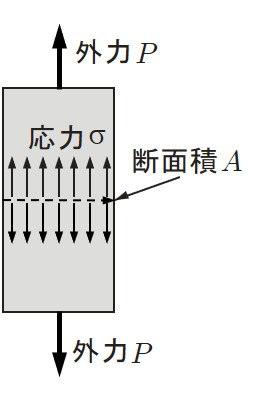
図のように引張力によって生ずる応力を
大きな引張力が作用すると,元の断面積が小さくなる.この断面積を用いて求めた応力を
棒に引張荷重が作用すると,棒は伸びる.このような現象を
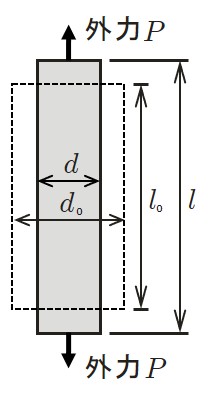
一方,変形前の棒の体積を( $V$ )とし,変形後( $V+\Delta V$ )となった場合,単位体積あたりの変化量を
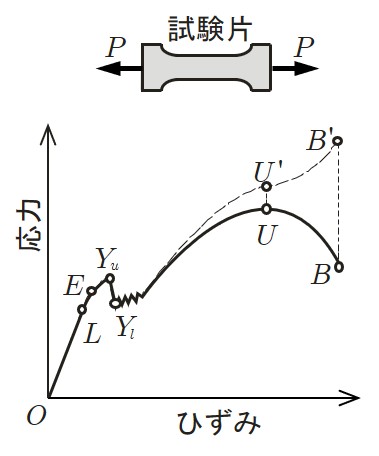
$E$ 点から荷重をさらに加えると,やがて $Y_u$ 点に達し,応力が低下して急激にひずみが増大する.このような現象を
この後,荷重を加えると,やがて応力値は最大点 $U$ に達し,$B$ 点において破断する.$U$ 点における応力を
1678年,Robert Hookはある範囲内(
\[
{\rm (2.1.4)}
応力 = 定数 \times ひずみ
\]
ここで,比例定数を,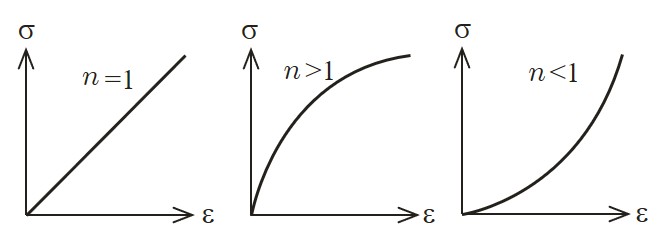
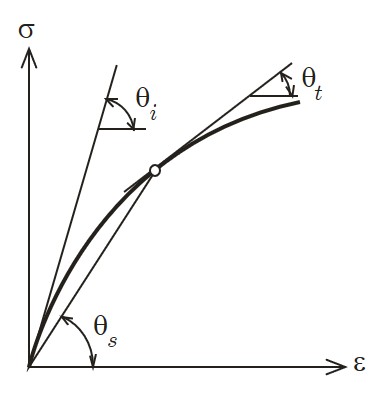
コンクリートのように応力-ひずみ関係が曲線で表される場合,
一方,次に示すように,ポアソン比の逆数を
部材の軸と一致する方向に引張力を受け,それに抵抗する部材を
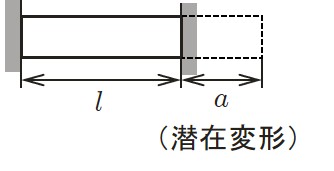
構造に応力が発生する原因は,荷重,温度変化,潜在変形などが考えられる.本節では,これらの要因による単一の材料から構成される引張材あるいは圧縮材の応力とひずみ,あるいは変位の関係について整理する.
部材は温度変化に伴い伸縮する.

潜在的に変形がある場合にも,応力が生ずる.
2.2 組合わせ構造
弾性係数が同じ $E$ で面積が異なる2本の棒が,
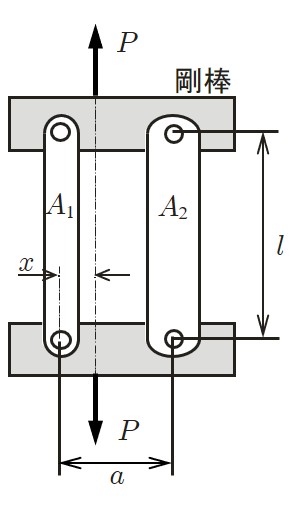
いま,2本の棒に生じる軸方向力を $N_1$,$N_2$ とすれば,それぞれの力は
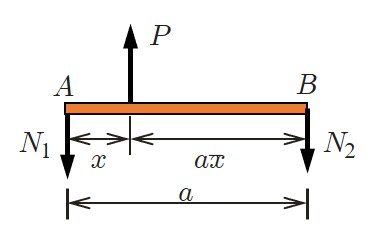
$\hspace{2em}$図2.2.7 力のつり合い
これらの力が釣り合っていることから,$A$ 点および$B$ 点のモーメントのつり合いより次の関係が得られる.
\[
{\rm (2.2.15)}
\left.
\begin{array}{rclcl}
a N_1 &=& (a -x )P \hspace{2em} &\therefore& N_1 = \displaystyle \frac{a-x}{a} P \\
a N_2 &=& xP \hspace{2em} &\therefore& N_2 = \displaystyle \frac{x}{a} P\
\end{array}
\right\}
\]
したがって,各部材に生ずる応力が以下のように求まる.
\[
{\rm (2.2.16)}
\left.
\begin{array}{rclcl}
\sigma_1 &=& \displaystyle \frac{N_1}{A_1}
&=& \displaystyle \frac{a-x}{a} \cdot \frac{P}{A_1} \\
\sigma_2 &=& \displaystyle \frac{N_2}{A_2}
&=& \displaystyle\frac{x}{a} \cdot \frac{P}{A_2} \\
\end{array}
\right\}
\]
また,それぞれの部材はフックの法則に従うため,次の関係が成立している.
\[
{\rm (2.2.17)}
\left.
\begin{array}{rcl}
\sigma_1 &=& E \varepsilon_1 \\
\sigma_2 &=& E \varepsilon_2
\end{array}
\right\}
\]
一方,2本の棒が同じ伸びになるということは,$\varepsilon_1=\varepsilon_2$ と同じ意味である.したがって,式(2.2.17) より,$\sigma_1=\sigma_2$ となり,式(2.2.16) より以下のように荷重作用位置 $x$ が求まる.
\[
{\rm (2.2.18)}
\frac{a-x}{a} \cdot \frac{P}{A_1} = \frac{x}{a} \cdot \frac{P}{A_2}
\hspace{2em} \therefore
x = \frac{A_2}{A_1 + A_2}a
\]
例題2.2.5
図2.2.6 において,$a=50 {\rm cm}$ とし,荷重 $P=20 {\rm kN}$,弾性係数を $E=205 {\rm GPa}$ とする.いま,部材1の応力が $\sigma_1=50 {\rm MPa}$ で,荷重 $P$ の作用位置 $x$が $20 {\rm cm}$ であったとき,剛棒が傾斜しないための,それぞれの部材の断面積を求めてみよう.
式(2.2.16) によれば,部材1の断面積が次のように求まる.
\[
A_1 = \frac{a-x}{a} \cdot \frac{P}{\sigma_1}
= \frac{0.5 - 0.2}{0.5} \cdot \frac{20 \times 10^3}{50 \times 10^6}
= 2.4 \; {\rm cm^2}
\]
一方,式(2.2.18) より,部材2の断面積が次のように求まる.
\[
A_2 = \frac{x}{a-x} \cdot A_1
= \frac{0.2}{0.5-0.2} \times 2.4
= 1.6 \; {\rm cm^2}
\]
図2.2.6 に示す構造の変位と力の関係を行列演算を利用して求めてみよう.図2.2.7 より,力の釣り合いは次のように表すことができる.
\[
{\rm (2.2.19)}
N_1 + N_2 = P
\hspace{2em} または行列で \hspace{2em}
\left[
\begin{array}{cc}
1 & 1
\end{array}
\right]
\left\{
\begin{array}{c}
N_1 \\
N_2
\end{array}
\right\}
= P
\]
これを,つり合い条件 とよんでいる.応力とひずみの定義ならびにフックの法則より,部材に生ずる軸方向の力と部材の伸びの間には以下の関係がある.
\[
{\rm (2.2.20)}
\left.
\begin{array}{rcl}
N_1 &=& \frac{E_1 A_1}{l_1} \cdot \Delta u_1 \\
N_2 &=& \frac{E_2 A_2}{l_2} \cdot \Delta u_2
\end{array}
\right\}
\hspace{1em} または行列で \hspace{1em}
\left\{
\begin{array}{c}
N_1 \\
N_2
\end{array}
\right\}
=
\left[
\begin{array}{cc}
\frac{E_1 A_1}{l_1} & 0 \\
0 & \frac{E_2 A_2}{l_2}
\end{array}
\right]
\left\{
\begin{array}{c}
\Delta u_1 \\
\Delta u_2
\end{array}
\right\}
\]
式(2.2.20) は,変形条件 とよばれている.一方,剛棒が水平に移動することを前提としているため,それぞれの部材の伸びは同一であり,以下の式により表わすことができる.
\[
{\rm (2.2.21)}
\Delta u_1 = \Delta u_2 = \Delta u
\hspace{1em} または行列で \hspace{1em}
\left\{
\begin{array}{c}
\Delta u_1 \\
\Delta u_2
\end{array}
\right\}
=
\left[
\begin{array}{c}
1 \\
1
\end{array}
\right]
\Delta u
\]
この関係は適合条件 とよばれている.以上,3つの条件を整理すると次の関係が得られる.
\[
{\rm (2.2.22)}
\left[
\begin{array}{cc}
1 & 1
\end{array}
\right]
\left[
\begin{array}{cc}
\frac{E_1 A_1}{l_1} & 0 \\
0 & \frac{E_2 A_2}{l_2}
\end{array}
\right]
\left\{
\begin{array}{c}
1 \\
1
\end{array}
\right\}
\Delta u
= P
\]
式(2.2.22) より変位が求まり,その結果,各部材の軸方向の力,ひずみ,応力が順次求まる.また,式(2.2.15) より荷重の作用位置も求めることができる.図2.2.6 の問題では,$E_1=E_2$,$l_1=l_2$ であるため,式(2.2.22) は次のようになる.
\[
\Delta u = \frac{Pl}{E(A_1+A_2)}
\]
2.2.4 簡単なトラス構造
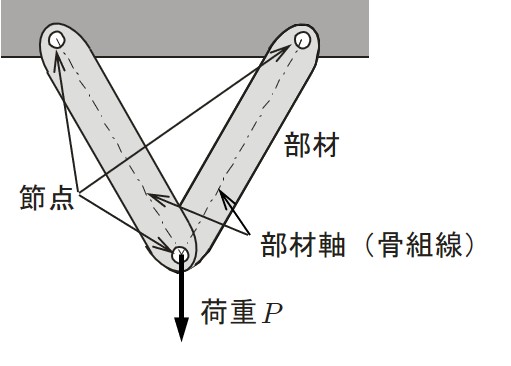
図2.2.8 に示すように棒の両端を摩擦のないピン(ヒンジ)で結合し,組み立てた骨組構造 (framed structure)をトラス (truss)といい,各結合点を節点 (node)とよぶ.
$\hspace{1em}$図2.2.8 簡単なトラス構造
トラス構造では各節点を結ぶ線(骨組線)は各部材の軸線と一致するもと仮定しており,節点に荷重を加えるとトラスを構成する部材には引張または圧縮の軸方向力が生ずる.本節では,このようなトラス構造の解析法について説明する.
いま,各部材の変形が非常に小さいとする,微小変形の仮定のもとに,節点に荷重が作用した場合の各部材に生じる軸方向の力ならびに変位を求めてみよう.解析にあたり,図2.2.8に示す構造を図2.2.9に示すように骨組線によって表す.
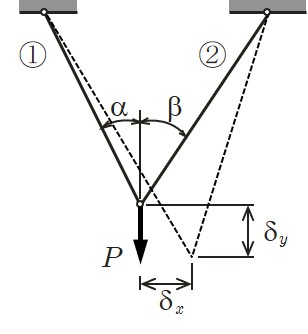
$\hspace{0em}$図2.2.9 荷重が作用する構造
図中,実線が元の構造を表しており,点線が変形後の状態を示している.微小変形の仮定では,変形後においても部材間の角度の変化は小さいと考え,同じ角度を用いる.
図2.2.9 における荷重作用点における力のつり合い式は,図2.2.10 を参考にすると以下のようになる.
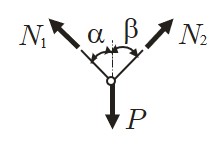
$\hspace{0em}$図2.2.10 節点に作用する力
(つり合い条件)
\[
{\rm (2.2.23)}
\left.
\begin{array}{rcl}
N_1 \cos \alpha + N_2 \cos \beta &=& P \\
N_1 \sin \alpha - N_2 \sin \beta &=& 0
\end{array}
\right\}
\]
ここで,$N_1$,$N_2$は各部材に生ずる軸方向の力である.式(2.2.23) より軸方向の力を求めることができるが,このように力の釣り合いのみにより各部材の応力が求められるような部材を静定部材 (statically determinate member)といい,単純に求まらない部材を不静定部材 (statically indeterminate member)という.ここでは,式(2.2.23) を解かずに,一旦,以下のように行列で整理しておく.
\[
{\rm (2.2.24)}
\left[
\begin{array}{rr}
\cos \alpha & \cos \beta \\
\sin \alpha & -\sin \beta
\end{array}
\right]
\left\{
\begin{array}{c}
N_1 \\
N_2
\end{array}
\right\}
=
\left\{
\begin{array}{c}
P \\
0
\end{array}
\right\}
\]
一方,各部材の弾性係数を $E_1$,$E_2$,断面積を $A_1$,$A_2$,部材長を $l_1$,$l_2$ とすれば,変形条件が以下のように整理できる.
(変形条件)
\[
{\rm (2.2.25)}
\left.
\begin{array}{rcl}
N_1 &=& \frac{E_1 A_1}{l_1} \delta_1 \\
N_2 &=& \frac{E_2 A_2}{l_2} \delta_2
\end{array}
\right\}
\hspace{1em} または行列で \hspace{1em}
\left\{
\begin{array}{c}
N_1 \\
N_2
\end{array}
\right\}
=
\left[
\begin{array}{cc}
\frac{E_1 A_1}{l_1} & 0 \\
0 & \frac{E_2 A_2}{l_2}
\end{array}
\right]
\left\{
\begin{array}{c}
\delta_1 \\
\delta_2
\end{array}
\right\}
\]
ここで,$\delta_1$,$\delta_2$ は部材の伸縮量であり,$\delta_x$,$\delta_y$ と図2.2.11 に示す関係がある.

$\hspace{1em}$図2.2.11 変位の関係
これを,適合条件として整理すれば,以下のような関係が得られる.
(適合条件)
\[
{\rm (2.2.26)}
\left.
\begin{array}{rcl}
\delta_1 &=& \delta_y \cos \alpha + \delta_x \sin \alpha \\
\delta_2 &=& \delta_y \cos \beta - \delta_x \sin \beta
\end{array}
\right\} \\
\hspace{7em} または行列で \hspace{1em}
\left\{
\begin{array}{c}
\delta_1 \\
\delta_2
\end{array}
\right\}
=
\left[
\begin{array}{rr}
\cos \alpha & \sin \alpha \\
\cos \beta & -\sin \beta
\end{array}
\right]
\left\{
\begin{array}{c}
\delta_x \\
\delta_y
\end{array}
\right\}
=
\left\{
\begin{array}{c}
P \\
0
\end{array}
\right\}
\]
以上の3つの条件より,変位に関する方程式が以下のように得られる.
\[
{\rm (2.2.27)}
\left[
\begin{array}{rr}
\cos \alpha & \cos \beta \\
\sin \alpha & -\sin \beta
\end{array}
\right]
\left[
\begin{array}{cc}
\frac{E_1 A_1}{l_1} & 0 \\
0 & \frac{E_2 A_2}{l_2}
\end{array}
\right]
\left[
\begin{array}{rr}
\cos \alpha & \sin \alpha \\
\cos \beta & -\sin \beta
\end{array}
\right]
\left\{
\begin{array}{c}
\delta_x \\
\delta_y
\end{array}
\right\}
=
\left\{
\begin{array}{c}
P \\
0
\end{array}
\right\}
\]
したがって,式(2.2.27) はつぎのようになる.
\[
{\rm (2.2.28)}
\left[
\begin{array}{c|c}
\cos^2 \alpha \frac{E_1A_1}{l_1} + \cos^2 \beta \frac{E_2A_2}{l_2} &
\cos \alpha \sin \alpha \frac{E_1A_1}{l_1}-\cos \beta \sin \beta \frac{E_2A_2}{l_2}
\\ \hline
\cos \alpha \sin \alpha \frac{E_1A_1}{l_1}-\cos \beta \sin \beta \frac{E_2A_2}{l_2} & \sin^2 \alpha \frac{E_1A_1}{l_1} + \sin^2 \beta \frac{E_2A_2}{l_2}
\end{array}
\right]
\left\{
\begin{array}{c}
\delta_x \\
\delta_y
\end{array}
\right\}
=
\left\{
\begin{array}{c}
P \\
0
\end{array}
\right\}
\]
これを解くと荷重作用点に関する変位が求まる.求まった変位を式(2.2.26) に代入すれば,各部材の伸縮量が計算できる.さらに,式(2.2.25) を用いれば,各部材に軸方向の力が計算できる.
例題2.2.6
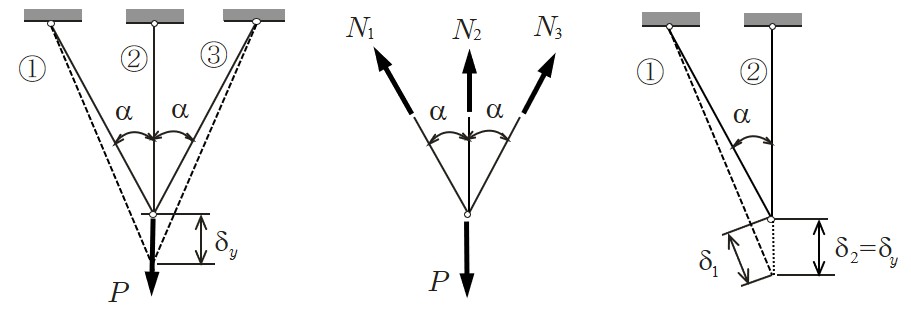
図2.2.12(a) に示す左右対称のトラス構造に関する変位および各部材の軸方向の力を求めてみよう.ただし,①と③の部材は弾性係数,断面積とも同一の値とする.
$\hspace{5em}{\rm (a)} \hspace{8em}{\rm (b)} \hspace{8em}{\rm (c)}$
$\hspace{8em}$図2.2.12 左右対称のトラス構造
図(b) を参照してつり合い条件式をたてると以下のようになる.
\[
\left.
\begin{array}{l}
N_1 \sin \alpha - N_3 \sin \alpha = 0 \\
N_1 \cos \alpha + N_2 + N_3 \cos \alpha = P
\end{array}
\right\}
\]
はじめの式より $N_1=N_3$ となる.また,2番目の式および,変形条件,適合条件より,
\[
\textbf{(つり合い条件)}
\left[
\begin{array}{ccc}
\cos \alpha & 1 & \cos \alpha
\end{array}
\right]
\left\{
\begin{array}{c}
N_1 \\
N_2 \\
N_3
\end{array}
\right\} = P
\]
\[
\textbf{(変形条件)}
\left\{
\begin{array}{c}
N_1 \\
N_2 \\
N_3
\end{array}
\right\} =
\left[
\begin{array}{ccc}
\frac{E_1A_1}{l_1} & 0 & 0 \\
0 & \frac{E_2A_2}{l_2} & 0 \\
0 & 0 & \frac{E_3A_3}{l_3}
\end{array}
\right]
\left\{
\begin{array}{c}
\delta_1 \\
\delta_2 \\
\delta_3
\end{array}
\right\}
\]
\[
\textbf{(適合条件)}
\left\{
\begin{array}{c}
\delta_1 \\
\delta_2 \\
\delta_3
\end{array}
\right\}
=
\left[
\begin{array}{c}
\cos \alpha \\
1 \\
\cos \alpha
\end{array}
\right]
\delta_y
\]
である.以上の3つの条件より以下の方程式が得られる.
\[
\left(
\frac{E_1A_1}{l_1} \cos^2 \alpha
+\frac{E_2A_2}{l_2}
+\frac{E_3A_3}{l_3} \cos^2 \alpha
\right) \delta_y = P
\]
したがって,変位が以下のように得られる.
\[
\therefore
\delta_y = \frac{P}
{\left( 2\frac{E_1A_1}{l_1} \cos^2 \alpha +\frac{E_2A_2}{l_2} \right)}
\]
ただし,$E_1=E_3$,$A_1=A_3$,$l_1=l_3$bである.
一方,軸方向力は適合条件,変形条件を用いて次のように求まる. \[ N_1 = N_3 = \frac{E_1A_1}{l_1}\cos \alpha \frac{P}{\left( 2 \frac{E_1A_1}{l_1}\cos^2 \alpha + \frac{E_2A_2}{l_2}\right)} \] \[ N_2 = \frac{E_2A_2}{l_2} \frac{P}{\left( 2 \frac{E_1A_1}{l_1}\cos^2 \alpha + \frac{E_2A_2}{l_2}\right)} \]2.3.1 せん断応力の定義
図2.3.1 に示すように,鋼板に大きさが等しく,部材軸に直角で向きの相反する平行な2つの力Qが微小距離dxだけへだてて作用した状態を考えてみよう.この力をせん断力 (shearing force) とよんでいる.
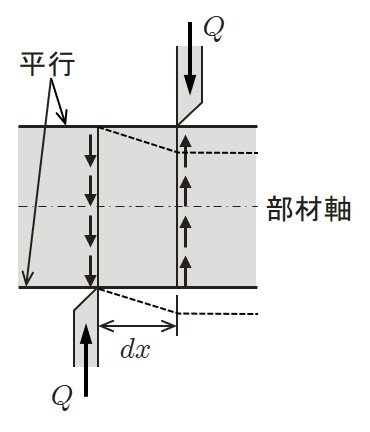
$\hspace{2em}$図2.3.1 せん断力
せん断力が作用している面の面積を $A$ とすれば,単位面積当たりのせん断力が次のように与えられる.
\[
{\rm (2.3.1)}
\tau = \frac{Q}{A}
\]
これを,せん断応力 (shearing stress) という.ただし,このように定義されるせん断応力は断面に一様に分布するものと仮定された平均的な量である.
図2.3.2 に示す直六面体 $ABCD$ はせん断力の作用によって,$ABC'D'$ に変形する.図に示す状態を単純せん断 (simple shear) という.
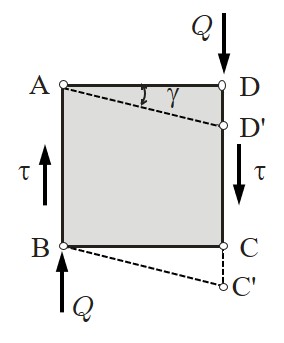
$\hspace{2em}$図2.3.2 せん断ひずみ
このとき,せん断ひずみ (shearing strain) が以下のように定義される.
\[
{\rm (2.3.2)}
\frac{DD'}{AD} = \tan \gamma
\]
ただし,弾性範囲内でせん断ひずみは微小であるため,$\tan \gamma$ であり,$\gamma$ がせん断ひずみとなる.
弾性限度内ではせん断応力 $\tau$ とせん断ひずみ $\gamma$ の比が一定であり,以下に示すフックの法則が成立する. \[ {\rm (2.3.3)} \tau = G \cdot \gamma \] ここで,$G$ はせん断弾性係数 (shear modulus) あるいは横弾性係数 (modulus of transverse elasticity),剛性率 (modulus of rigidity) とよばれている.構造用鋼材では $G=79 {\rm GPa}$ がよく利用されているが,実際の設計に際しては示方書や指針,実験等を参考にして決定しなければならない.
次に,微小六面体に,図2.3.3 に示すような大きさが等しく互いに平行で向きの異なる2組のせん断応力が作用し,平衡が保たれた状態を考えてみよう.
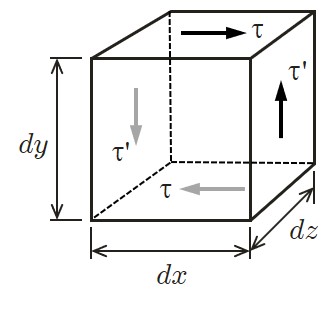
$\hspace{1em}$図2.3.3 共役せん断応力
このとき,水平,鉛直方向の力の釣り合いの他,モーメントの釣り合いも満たしていなければならない.したがって,次の関係が成立する.
\[
{\rm (2.3.4)}
( \tau dx dz )dy = ( \tau' dy dz ) dx
\]
この結果,以下の関係が常に成立する.
\[
{\rm (2.3.5)}
\tau = \tau'
\]
これを,共役せん断応力 (conjugate shearing stress) という.
例題2.3.1
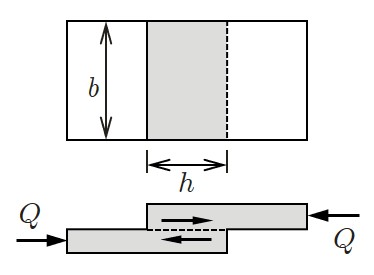
図2.3.4 に示すように,$b=2 {\rm cm}$,$h=3 {\rm cm}$ の面で2枚の板が接着されている.
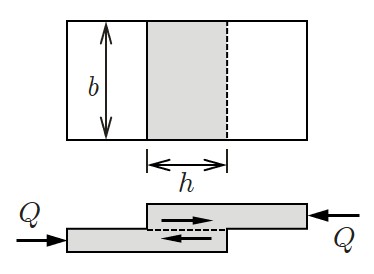
$\hspace{2em}$図2.3.4 接着面
このとき,図のような荷重 $Q=20 {\rm kN}$ が作用した場合の接着面におけるせん断応力を求めてみよう.式(2.3.1) によれば,せん断応力が次のように求まる.
\[
\tau = \frac{Q}{A}
= \frac{Q}{bh}
= \frac{20 \times 10^3}{2 \times 10^{-2} \times 3 \times 10^{-2}}
= 33.3 \; {\rm MPa}
\]
例題2.3.2
図2.3.5 に示すポンチを押し込んだとき,周辺のせん断応力が $49 {\rm MPa}$ であった.
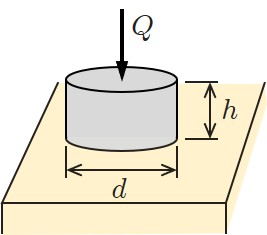
$\hspace{0em}$図2.3.5 ポンチの押し込み
ポンチの直径 $d=5{\rm cm}$,高さ$h=1{\rm cm}$ のとき,ポンチを押し込む力 $Q$ を求めてみよう.この問題の場合,せん断応力が生ずる面は円柱の周辺であるから,式(2.3.1) より,$Q$ が以下のように求まる.
\[
Q = \tau \cdot A
= \tau \cdot (\pi l \cdot h)
= 49 \times 10^6 ( \pi \times 5 \times 10^{-2} \times 1 \times 10^{-2})
= 77 \; {\rm kN}
\]
2.3.2 継手のせん断応力
リベットやボルト等によって,複数の部材を接合する方法に図2.3.6 に示すような,重ね継手と突合せ継手の2種類がある.
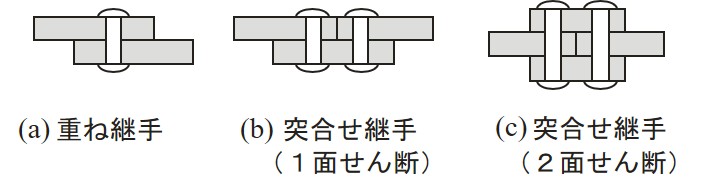
$\hspace{8em}$図2.3.6 継ぎ手の種類
突合せ継手は,さらに,1面せん断と2面せん断の2種類がある.重ね継手と突合せ継手の1面せん断は,せん断面が1つであることより,力学的には単純せん断継手に分類され,突合せ継手の2面せん断は複せん断継手に分類される.また,溶接によって複数の部材を接合することもよく行われている.ここでは,これら継手に生ずるせん断応力について述べる.
(1)単純せん断継手
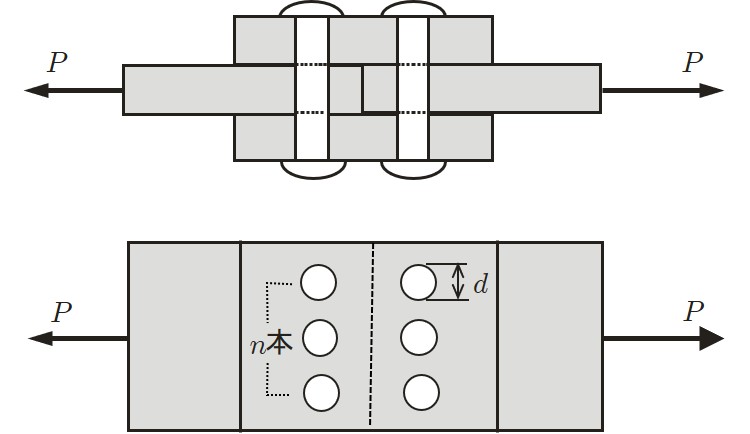
図2.3.7 は $n$ 本のリベットによって接合された重ね継手を示した図である.
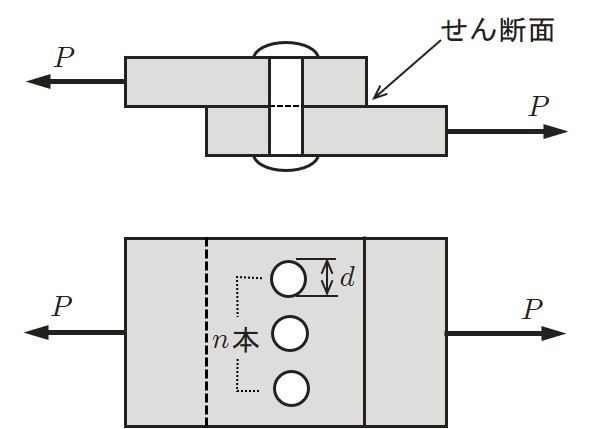
$\hspace{2em}$図2.3.7 単純せん断継手
このとき,リベットに生ずるせん断力と荷重 $P$ との関係は次のように求めることができる.ただし,$n$ はリベットの本数,$d$ はリベットの直径を表している.
\[
{\rm (2.3.6)}
P = n \frac{\pi d^2}{4} \cdot \tau
\]
この関係によれば,荷重 $P$ よりリベットの本数が求められるが,実際の設計では,リベットが受け持つせん断応力のみでリベットの本数を決定することはない.
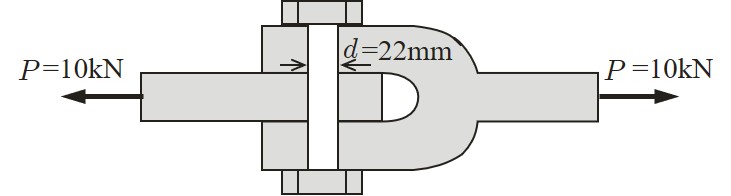
例題2.3.3
図2.3.8 に示すような,リベットで接合された突合せ継手がある.
$\hspace{6em}$図2.3.8 突合せ継手
このとき,リベット1本当たりの受け持つせん断応力を求めてみよう.式(2.3.6) を用いると,以下のように計算することができる.
\[
\tau = P \frac{4}{n \pi d^2}
= 98 \times \frac{4}{3 \times \pi \times (2 \times 10^{-2})^2}
= 104 \; {\rm kPa}
\]
(2)複せん断継手
図2.3.9 は複せん断継手の例を示した図である.
$\hspace{6em}$図2.3.9 複せん断継手
この場合,リベットにおけるせん断面が上下2面あるため,せん断面積が式(2.3.6) の2倍となり,せん断力 $P$ とせん断応力の関係が以下のように求まる.
\[
{\rm (2.3.7)}
P = 2 \cdot n \frac{\pi d^2}{4} \cdot \tau
\]
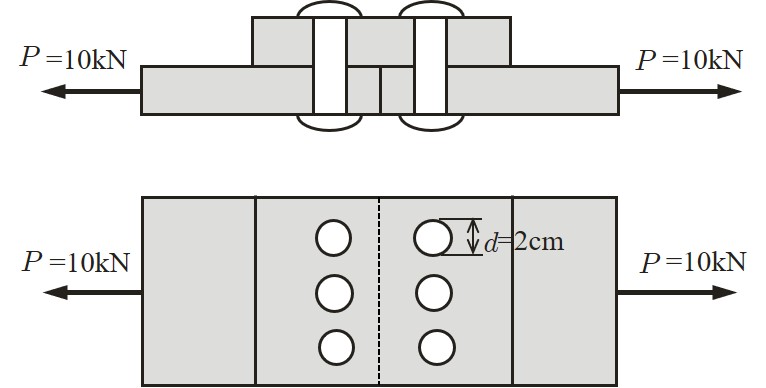
例題2.3.4
図2.3.10 に示すボルトによって接合された構造において,ボルトの生ずるせん断応力を求めてみよう.
$\hspace{1em}$図2.3.10 ボルトに作用するせん断応力
ボルトは,上下2面でせん断されることより,式(2.3.7) を用いて以下のようにボルトに生ずるせん断応力を求めることができる.
\[
\tau = \frac{P}{2 \cdot n \frac{\pi d^2}{4}}
= \frac{98}{2 \times 1 \frac{ \pi \times (2.2 \times 10^{-2})^2}{4}}
= 128 \; {\rm kPa}
\]
(3)すみ肉溶接継手
図2.3.11 は単純なすみ肉溶接の例を示した図である.ただし,2枚の板は溶接部のみで接合されており,板どうしの摩擦は無いものと考える.
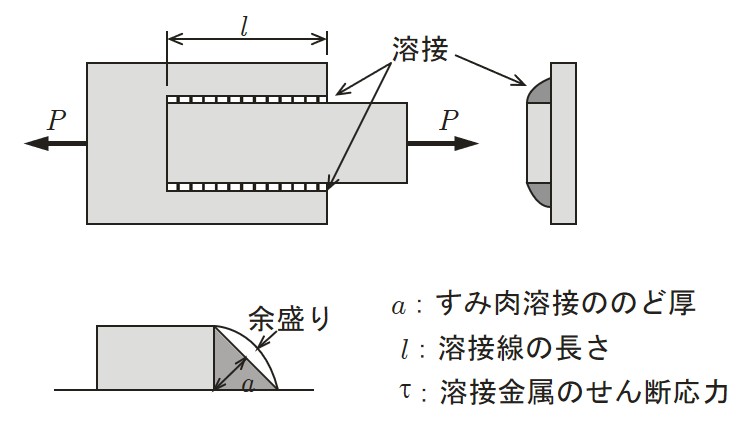
$\hspace{6em}$図2.3.11 すみ肉溶接
せん断力は,溶接部のみで受け持つ.このとき,溶接部のせん断応力とせん断力 $P$ とには以下の関係が成立する.
\[
{\rm (2.3.8)}
P = 2 a l \cdot \tau
\]
ここで,$l$ は溶接線の長さであり,式(2.3.8) における2は2箇所に溶接線があることによる.
2.3.3 せん断応力と軸応力
これまで述べてきたことをまとめる意味で,せん断応力と軸応力の比較を行ってみよう. せん断応力,せん断ひずみ,フックの法則は,それぞれ,表2.3.1 のように整理される.この表より,それぞれの応力とひずみの関係が同様な式により表現されていることが理解できる.
$\hspace{7em}$表2.3.1 軸応力とせん断応力の関係

2.4.1 丸棒のねじり
図2.4.1 に示すように,棒材の一端を固定し,他端に棒材の中心軸線に垂直な偶力 $T$ を加えると,棒材はねじられる.このような現象をねじり (torsion, twist)という.また,偶力 $T$ をねじりモーメント (torsional moment, twisting moment)またはトルク (torque)という.いま,ねじられた後においても断面は円形を保ち,かつねじれの程度が小さい間は棒の直径と長さが保持されるものと仮定する.
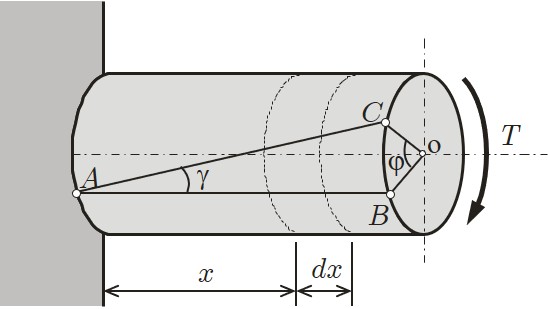
$\hspace{4em}$図2.4.1 丸棒のねじり
図2.4.1 において,直線 $AB$ がねじり後,$AC$ となったとき,$\angle BOC=\varphi$ をねじり角 (angle of torsion, twisting angle)という.ねじれ角は中心軸線に沿って変化するから,微小部分 $dx$ を取り出して単位長さあたりのねじれ角を求めるとつぎのようになる.
\[
{\rm (2.4.1)}
\theta = \frac{d \varphi}{dx}
\]
式(2.4.1) における $\theta$ を比ねじれ角 (specific angle of torsion)という.比ねじり角は一様円形断面の場合一定となる.図2.4.2 は,微小部分dxを取り出した図である.
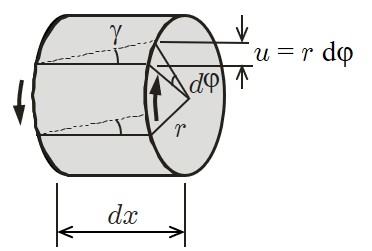
$\hspace{0em}$図2.4.2 せん断ひずみ
変形後も半径が変化しないという仮定を用いているため,丸棒の表面におけるせん断ひずみ $\gamma_0$ は $dx$ 部分の相対的なずれより,次のように求めることができる.
\[
{\rm (2.4.2)}
\gamma_0 = r \frac{d \varphi}{dx}
= r \cdot \theta
\]
一方,せん断応力は,せん断に関するフックの法則より,せん断弾性係数を $G$ として以下のように求めることができる.
\[
{\rm (2.4.3)}
\tau = G \gamma
\]
ここで,せん断ひずみ $\gamma$ は,図2.4.3 に示すように中心からの距離 $\rho$ に比例する.
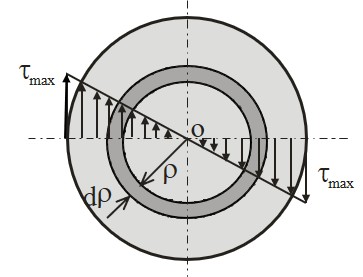
$\hspace{1em}$図2.4.3 せん断応力分布
このため,式(2.4.3) は次のように表すことができる.
\[
{\rm (2.4.4)}
\tau = G \cdot \rho \theta \hspace{2em} ( \because \gamma = \rho \theta )
\]
すなわち,せん断応力は,図2.4.3 のように半径方向に線形分布する.
このせん断応力によって生ずるねじりモーメントは,外力として作用させたねじりモーメント $T$ と釣り合っていなけばならない.図2.4.3 を参考にこの関係を求めると,次のようになる.
\[
{\rm (2.4.5)}
T = \int_A (\rho \cdot \tau)dA
= \int_A \rho ( G \cdot \rho \theta) dA
= G \theta \int_A \rho^2 dA
\]
ここで,積分は断面2次極モーメント (polar moment on inertia of area)と呼ばれる断面諸量の1つで,詳細は次章で述べるが,円形断面の場合,次のようになる.
\[
{\rm (2.4.6)}
I_P = \int_A \rho^2 dA
= \frac{\pi r^4}{2}
= \frac{ \pi d^4}{32}
\]
ここで,$r$ は円形断面の半径,$d$ は直径を表している.したがって,比ねじり角は次のようになる.
\[
{\rm (2.4.7)}
T = G \theta I_P = G \theta \frac{\pi d^4}{32} \hspace{2em}
\therefore \theta = \frac{T}{G I_P}
= \frac{32}{\pi d^4} \cdot \frac{T}{G}
\]
ここで,$GI_P$ は,単位長さの棒に単位ねじれ角を与えるときのねじりモーメントで,ねじりこわさ (torsional rigidity)と呼ばれている.
式(2.4.7) を式(2.4.4) に代入すれば,外力としてのねじりモーメントより,せん断応力を以下のように求めることができる.
\[
{\rm (2.4.8)}
\tau = G \rho \theta = \frac{32}{\pi d^4} T \cdot \rho
\]
最大せん断応力は $\rho$ が最大のとき,すなわち,丸棒の表面で生ずることより,以下のように求められる.
\[
{\rm (2.4.9)}
\tau_{\rm max} = \frac{32}{\pi d^4} T \cdot \frac{d}{2}
= \frac{16}{\pi d^3} T
\]
例題2.4.1
丸棒に$98 {\rm kN\cdot m}$ のねじりモーメントが作用する.いま,材料の許容せん断応力が $\tau_a=98 {\rm MPa}$ のとき,丸棒の必要最小直径を求めてみよう.$\tau_{\rm max} \lt \tau_a$ でなければならないことより,式(2.4.9) を用いて以下のように直径を決定することができる.
\[
\tau_{\rm max} = \frac{32}{\pi d^4} T \cdot \frac{d}{2}
= \frac{16}{\pi d^3} T
\lt \tau_a
\]
\[
d \gt \sqrt[3]{\frac{16T}{\pi \tau_a}}
= \sqrt[3]{\frac{16 \times 98 \times 10^3}{\pi \times 98 \times 10^6}}
= 0.172 \; {\rm m}
\]
2.4.2 中空丸棒のねじり
肉厚の厚い中空丸棒に生ずるせん断応力を求めてみよう.図2.4.4 は外径 $d_1$,内径 $d_2$ を示した図である.
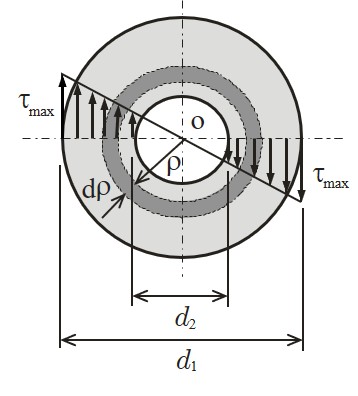
$\hspace{2em}$図2.4.4 中空丸棒のねじり
このとき,せん断応力は図中に示すように分布しており,中実丸棒の場合と同様に,せん断応力によって生ずるねじりモーメントは,外力として作用させたねじりモーメント $T$ と釣り合っていなければならない.すなわち,式(2.4.5) と同じ関係が成立する.
\[
{\rm (2.4.10)}
T = \int_A ( \rho \cdot \tau ) dA = G \theta \int_A \rho^2 dA
\]
ただし,積分範囲が異なるため,断面2次極モーメントの式は以下のようになる.
\[
{\rm (2.4.11)}
I_p = \int_A \rho^2 dA = \frac{\pi}{32} \left( d_1^4 - d_2^4 \right)
\]
したがって,比ねじり角およびせん断応力が以下のように求められる.
\[
{\rm (2.4.12)}
\theta = \frac{T}{G I_P}
= \frac{32}{\pi \left( d_1^4 - d_2^4 \right)} \cdot \frac{T}{G}
\hspace{2em} \therefore
\tau = G \rho \theta
= \frac{32}{\pi \left( d_1^4 - d_2^4 \right)} T \cdot \rho
\]
最大せん断応力は,中実丸棒の場合と同様,中空丸棒の外側の表面で生じ,以下の式で求めることができる.
\[
{\rm (2.4.13)}
\tau_{\rm max}
= \frac{16d_1}{\pi \left( d_1^4 - d_2^4 \right)} T
\]
例題2.4.2
外径 $d_1=100 {\rm mm}$,内径 $d_2=60{\rm mm}$,長さ $l=1 {\rm m}$ の中空丸鋼の一端が壁に固定されている.この状態で,他端に $T=49{\rm kN・m}$ のねじりモーメントが作用したときの,荷重が作用した端のねじり角がいくらになるか求めてみよう.ただし,せん断弾性係数は $G=79.4{\rm GPa}$ とする.
比ねじり角 $\theta$ は単位長さあたりのねじれ角であるから,ねじれ角は比ねじれ角に長さ $l$ をかけることで求めるこたができる. \[ \varphi = \theta \cdot l = \frac{32}{\pi \left( d_1^4 - d_2^4 \right)} \cdot \frac{T}{G} \cdot l = \frac{32}{\pi \left( 0.1^4 - 0.06^4 \right)} \cdot \frac{49 \times 10^3}{79.4 \times 10^9} \cdot 1 = 0.0722 \; {\rm rad} = 4.1 \; {\rm deg} \]2.4.3 その他の断面のねじり
円形断面以外の断面を持つ棒材にねじりモーメントが作用した場合,中心軸線に垂直な断面は,変形後に円形断面のように平面を保持することができなくなる.このため,せん断応力の分布は中心軸からの距離に単純に比例することはない.サン・ブナン(Saint Venant)はこれらの問題に対する解法を与えた.ここでは,簡単のこの研究を紹介する.(1)正方形断面
正方形断面の場合,最大せん断応力は辺の中点で生じ,1辺の長さを $a$ としたとき,以下のように与えられる. \[ {\rm (2.4.14)} \tau_{\rm max} = \frac{T}{0.208 a^3} = 4.80 \frac{T}{a^3} \] また,比ねじれ角は以下の式で与えられる. \[ {\rm (2.4.15)} \theta = \frac{T}{0.141 a^4 G} = 7.09 \frac{T}{a^4 G} \] このときの変形は図2.4.5 になる.
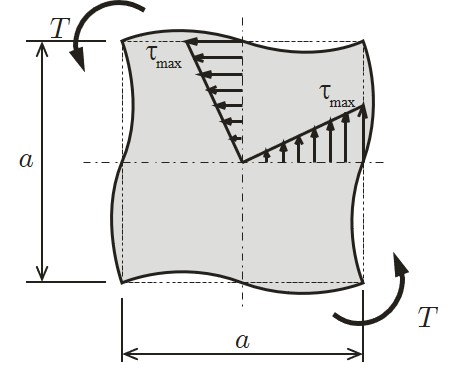
$\hspace{0em}$図2.4.5 正方形断面のせん断応力
(2)長方形断面
1辺の長さが $a$,他辺の長さが $b$ の長方形断面の場合,正方形断面の一般形として,最大せん断応力および比ねじれ角が以下のように与えられる. \[ {\rm (2.4.16)} \left. \begin{array}{rcl} \tau_{1 {\rm max}} &=& \displaystyle \frac{1}{k_1} \cdot \frac{T}{ab^2} \\ \tau_{2 {\rm max}} &=& k_2 \cdot \tau_{1 {\rm max}} \\ \theta &=& \displaystyle \frac{1}{k_3} \cdot \frac{T}{ab^3} \cdot \frac{1}{G} \end{array} \right\} \]
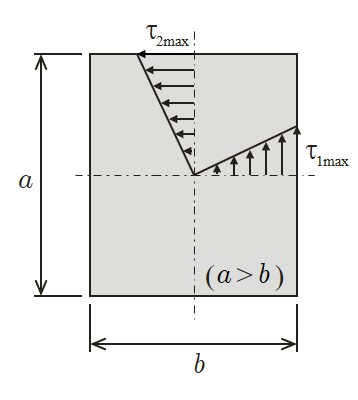
$\hspace{3em}$図2.4.6 長方形断面
ここで,$\tau_{1 {\rm max}}$ および $\tau_{2 {\rm max}}$ は,図2.4.6 に示すような,各辺における最大せん断応力である.式中の係数 $k_1$,$k_2$,$k_3$ は,それぞれ,断面の縦横比によって以下のように与えられる.表中,$a/b=1.0$ が正方形の場合に該当する.また,$k_1$,$k_3$ は $b$ が $a$ に比較して非常に小さい場合1/3に近づく.
(3)楕円断面
図2.4.7 に示すような,長軸が $a$,短軸が $b$ の楕円の場合の各軸における最大せん断応力および比ねじり角は次のように与えられる.
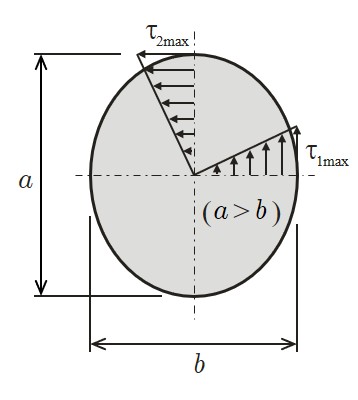
$\hspace{4em}$図2.4.7 楕円断面
\[
{\rm (2.4.17)}
\left.
\begin{array}{rcl}
\tau_{1 {\rm max}} &=& \displaystyle \frac{16}{\pi} \cdot \frac{T}{ab^2} \\
\tau_{2 {\rm max}} &=& \displaystyle \frac{16}{\pi} \cdot \frac{T}{a^2b} \\
\theta &=& \displaystyle \frac{16}{\pi} \cdot \frac{a^2+b^2}{a^3b^3} \cdot \frac{T}{G}
\end{array}
\right\}
\]
式から断面全域における最大せん断応力は短軸の端部において生ずることが理解できる.
(4)薄肉開断面
図2.4.8 に示すような,薄い板から構成される薄肉開断面の場合について考えてみよう.
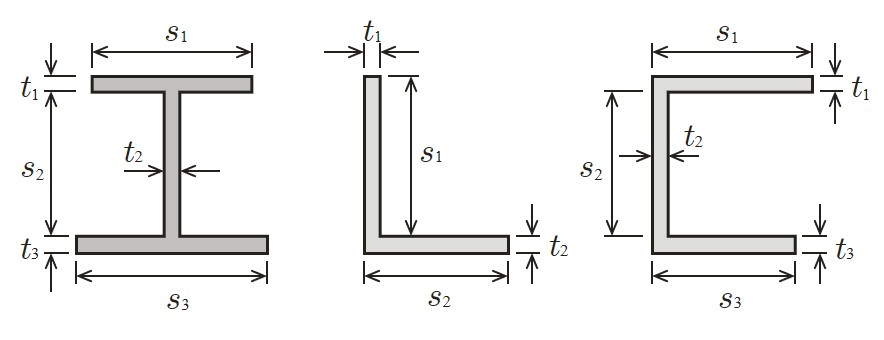
$\hspace{10em}$図2.4.8 薄肉開断面
厚みが $t$,長さが $a$ の1枚の薄い板の場合,近似的に表2.4.1 に示した $a/b$ が $\infty$ の場合に相当するため,式(2.4.16) の係数を
\[
{\rm (2.4.18)}
k_1 = k_3 = 1/3
\]
と考えることで,せん断応力および比ねじり角を簡易的に計算することができる.断面全体について考えた場合,最大せん断応力ならびに比ねじり角は以下のように求められる.
\[
{\rm (2.4.19)}
\left.
\begin{array}{rcl}
\tau_{\rm imax} &=& \displaystyle \frac{3t_i}{\sum s_i t_i^3}T \\
\theta &=& \displaystyle \frac{3}{\sum s_i t_i^3} \cdot \frac{T}{G}
\end{array}
\right\}
\]
ここで,下付の添字 $i$ は断面を構成する薄肉長方形板の番号を意味する.
例題2.4.3
図2.4.9 に示す,みぞ型断面の2断面における $s^2$ の中点の最大せん断応力は,式(2.4.19) より以下のように求めることができる.
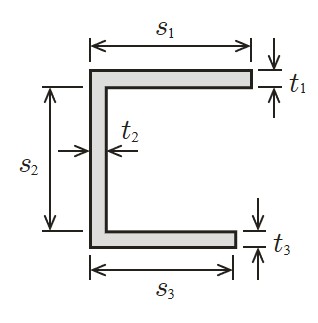
$\hspace{3em}$図2.4.9 みぞ型断面
\[
\tau_{\rm 1max} = \frac{3 t_2 T}{s_1 t_1^3 + s_2 t_2^3 + s_3 t_3^3}
\]
(5)薄肉閉断面(薄肉中空断面)
薄肉中空断面の場合,せん断応力が断面上に等分布すると仮定し,最大せん断応力,比ねじり角を求める.(円形断面の場合)
図2.4.10 に示すような中空円形断面の中心線における半径を $r$ とし,肉厚を $t$ として次のように最大せん断応力ならびに比ねじり角を求めることができる.
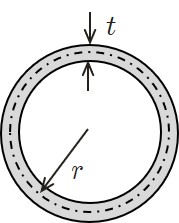
$\hspace{0em}$図2.4.10 円形断面
\[
{\rm (2.4.20)}
\left.
\begin{array}{rcl}
\tau_{\rm max} &=& \displaystyle \frac{T}{2 \pi r^2 t} \\
\theta &=& \displaystyle \frac{1}{2 \pi r^3 t} \cdot \frac{T}{G}
\end{array}
\right\}
\]
(正方形断面の場合)
図2.4.11 に示すように,各辺の平均長さを $a$ とし,肉厚を $t$ として以下のように最大せん断応力および比ねじり角を求めることができる.
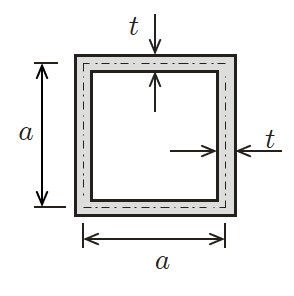
$\hspace{2em}$図2.4.11 正方形断面
\[
{\rm (2.4.21)}
\left.
\begin{array}{rcl}
\tau_{\rm max} &=& \displaystyle \frac{T}{2 a^2 t} \\
\theta &=& \displaystyle \frac{1}{a^3 t} \cdot \frac{T}{G}
\end{array}
\right\}
\]
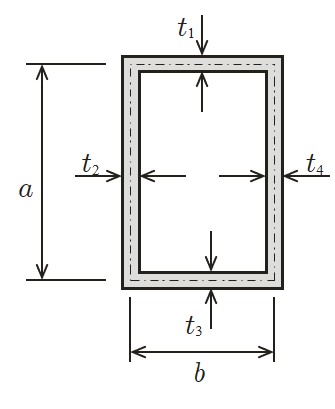
(長方形断面の場合)
図2.4.12 に示すように,一辺の平均長さが $a$,他辺の平均長さが $b$ で,それぞれの辺の肉厚が図のように与えられるとき,これらの値は次のように計算される.
 $\hspace{2em}$
$\hspace{2em}$図2.4.12 長方形断面
\[
{\rm (2.4.24)}
\tau_{n{\rm max}} = \frac{T}{2 ab t_n} \hspace{2em} (n=1,2,3,4)
\]
\[
{\rm (2.4.25)}
\theta = \frac{1}{a^2b^2} \left(
\frac{a}{t_1} + \frac{b}{t_2} + \frac{a}{t_3} + \frac{b}{t_4}
\right ) \frac{T}{G}
\]
以上示した各種断面形状の最大せん断応力は一般的に次のように書くことができる.
\[
{\rm (2.4.26)}
\tau_{\rm max} = \frac{T}{2 A_m t_i} \\
\]
ここで,$A_m$ は肉厚中心線が囲む断面積であり,$t_i$ は各辺の肉厚を示している.
2.5.1 任意断面の応力
2.1.1節 では断面が一様な棒が軸方向に引張力を受けた場合,図2.5.1 に示すように軸に垂直な断面の応力を定義した.
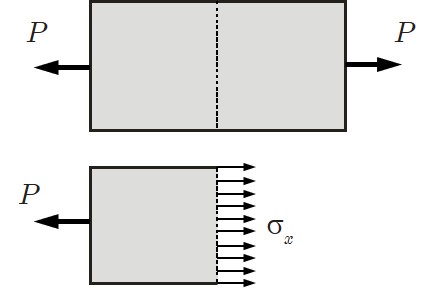
$\hspace{4em}$図2.5.1 棒の引張
しかし,一般に応力の値は,応力が作用する断面の位置によって異なる.このことを説明するため,図2.5.2 に示すような,$\varphi$ だけ傾斜した断面の応力を考えてみよう.
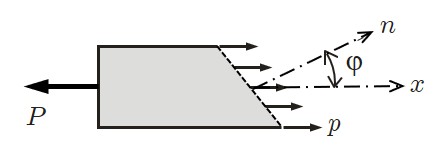
$\hspace{4em}$図2.5.2 傾斜面上の応力
図に示すように傾斜した面に作用している応力を $p$ とするとき,この応力が荷重 $P$ と平衡を保つためには次の関係が成立しなければならない.
\[
{\rm (2.5.1)}
P = A' \cdot p
\]
ここで,$A'$ は傾斜した面の面積であり,軸に垂直な面の面積を $A$ とするとき次の関係がある.
\[
{\rm (2.5.2)}
A' = \frac{A}{\cos \varphi}
\]
したがって,式(2.5.2) を式(2.5.1) に代入し,$p$ について整理すると以下の関係が得られる.
\[
{\rm (2.5.3)}
p = \frac{P}{A} \cos \varphi = \sigma_x \cos \varphi
\]
ここで,$\sigma_x$ は,軸に垂直な面における応力である.
以上のような面の傾きに依存する応力 $p$ を,図2.5.3 に示すように,傾斜面に垂直な成分と平行な成分に分解して見よう.
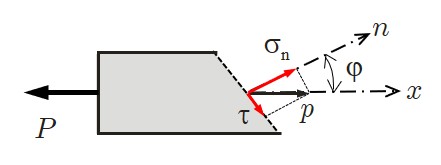
$\hspace{4em}$図2.5.3 応力の分解
\[
{\rm (2.5.4)}
\left.
\begin{array}{rcl}
\sigma_n &=& p \cos \varphi = \sigma_x \cos^2 \varphi \\
\tau &=& p \sin \varphi = \sigma_x \cos \varphi \sin \varphi
= \displaystyle \frac{1}{2} \sigma_x \sin 2 \varphi
\end{array}
\right\}
\]
ここで,$\sigma_n$ は垂直応力 (normal stress),$\tau$ はせん断応力 (shearing stress)である.
このように,一様断面を持つ棒材に単純に引張力を作用させた場合においても,軸に垂直な面では垂直応力が発生するだけであるが,その他の断面では垂直応力以外に断面をせん断しようとするせん断応力が発生する.
式(2.5.4) より,垂直応力$\sigma_n$ は $\varphi=0$ のとき最大となり,その値は以下のとおりである.
\[
{\rm (2.5.5)}
(\sigma_n)_{\rm max} = \sigma_x
\]
このとき,せん断応力は0となる.また,せん断応力 $\tau$ は $\varphi=\pi/4$ の傾斜面上で最大となり,
\[
{\rm (2.5.6)}
(\tau)_{\rm max} = \frac{1}{2} \sigma_x
\]
である.最大垂直応力が生ずる傾斜面では,せん断応力は0となることに注意されたい.
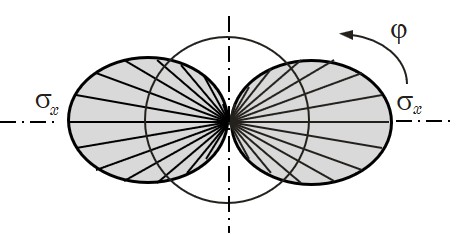
$\hspace{4em}$図2.5.4 垂直応力の分布
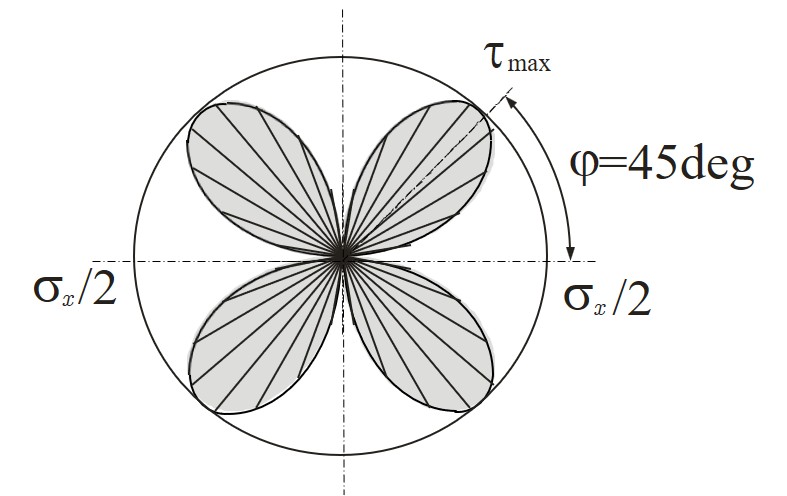
$\hspace{3em}$図2.5.5 せん断応力の分布
図2.5.4 は,垂直応力の分布を示した図であり,図2.5.5 はせん断応力の分布である.せん断応力が0となり,最大の垂直応力が生ずる傾斜面を主応力面 (principal plane of stress)と呼び,そのときの垂直応力を主応力 (principal stress)という.ここで,述べてきた関係は主応力が1つの場合で,この状態を単軸応力 (uniaxial stress)あるいは1軸応力と呼んでいる.主応力関係については,この後,2.5.3節 において詳細な説明を加える.
例題2.5.1
断面積 $A=10{\rm cm^2}$ の棒を軸方向に $1.96 {\rm kN}$ で引っ張たときの断面に生ずる垂直応力と $30^{\circ}$ 傾斜した面に生ずる垂直応力およびせん断応力を求めてみよう.軸方向の応力は
\[
\sigma_x = \frac{P}{A} = \frac{1960}{10 \times 10^{-4}} = 1.96 \; {\rm MPa}
\]
一方,傾斜面上の応力は式(2.5.4) より,以下のように計算される.
\[
{\rm (2.5.4)}
\left.
\begin{array}{rcl}
\sigma_n &=& \sigma_x \cos^2 \varphi
= 1.96 \times \cos^2 20~{\circ} = 1.47 \; {\rm MPa} \\
\tau &=& \displaystyle \frac{1}{2} \sigma_x \sin 2 \varphi
= \frac{1}{2} \times 1.96 \sin (2 \times 30^{\circ}) = 0.849 \; {\rm MPa}
\end{array}
\right\}
\]
2.5.2 組合せ応力
2.5.1節 では,単軸応力状態で議論をした.次に,幾つかの応力が同時に作用する場合について考えてみよう.議論を始めるにあたり,応力の正負について考えてみよう.$\sigma_x$,$\sigma_y$ を,それぞれ,$x$,$y$ 軸方向の垂直応力,$\tau_{xy}$,$\tau_{yx}$ を,それぞれ,$x$,$y$ 軸方向のせん断応力とするとき,一般に,応力は図2.5.6 に示すように,垂直応力については引張,せん断応力については図のような向きを正と考えている.ただし,$x$ 方向のせん断応力と $y$ 方向のせん断応力が大きさが等しいことは2.3.1節 で述べたとおりである.本書では,以後,$\tau_{xy}$ と$\tau_{yx}$ を区別せず,$\tau_{xy}$ として表すことにする.
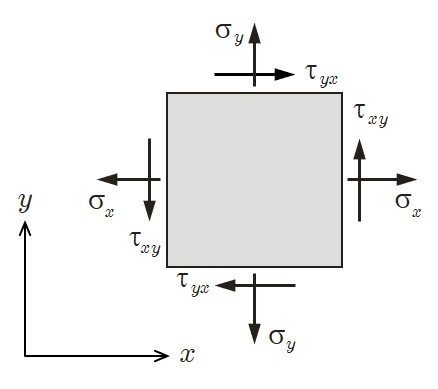
$\hspace{4em}$図2.5.6 正の応力の向き
応力の正負は扱う材料によて異なる.例えば,土やコンクリート等の圧縮を前提とする材料では圧縮応力を正と考える場合が多い.
さて,図のような応力のうち幾つか,あるいはすべてが作用した場合の任意断面における応力を求めてみよう.(1)互いに垂直な2方向に働く引張(圧縮)が作用する場合
図2.5.7(a) は互いに垂直な $x$,$y$ 方向の垂直応力 $\sigma_x$,$\sigma_y$ が作用した状態を示した図である.$n$ は任意断面の法線方向を示しており,$\varphi$ は断面の傾斜角である.図(b) はこのときの任意断面における $x$ 方向の応力の平衡状態を,図(c) は $y$ 方向の応力平衡状態を示している.$\sigma_n$ は法線方向の垂直応力であり,$\tau$ はせん断応力である.また,$p_x$,$p_y$ は,それぞれ,$x$,$y$ 軸方向の任意断面上の応力であり,$A_x$ および $A_y$ はそれぞれの軸方向の面積を表している.
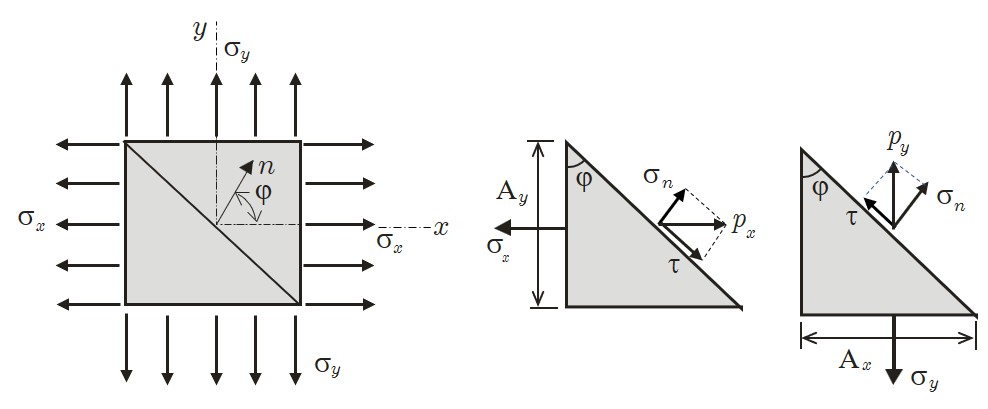
$\hspace{7em}$図2.5.7 互いに垂直な2方向の垂直応力
このとき,それぞれの方向の平衡条件より以下の関係が得られる.
( $x$ 方向)
\[
{\rm (2.5.7)}
\left.
\begin{array}{rcl}
\sigma_n &=& p_x \cos \varphi = \sigma_x \cos^2 \varphi \\
\tau &=& p_x \sin \varphi = \sigma_x \cos \varphi \sin \varphi
\end{array}
\right\}
\]
\[
\hspace{5em} 但し \hspace{2em}
\left(
p_x \frac{A_y}{\cos \varphi}-\sigma_x A_y = 0 \hspace{1em}
\therefore p_x = \sigma_x \cos \varphi
\right)
\]
( $y$ 方向)
\[ {\rm (2.5.8)} \left. \begin{array}{rcl} \sigma_n &=& p_y \cos \left( \displaystyle \frac{\pi}{2} - \varphi \right) = \sigma_y \sin^2 \varphi \\ \tau &=& p_y \sin \left( \displaystyle \frac{\pi}{2}\ - \varphi \right) = \sigma_y \sin \varphi \cos \varphi \end{array} \right\} \] \[ \hspace{5em} 但し \hspace{2em} \left( p_y \frac{A_x}{\sin \varphi}-\sigma_y A_x = 0 \hspace{1em} \therefore p_y = \sigma_y \sin \varphi \right) \] これらの垂直応力ならびにせん断応力を重ね合わせた応力が全体の応力になることより,最終的に以下の応力が求まる. \[ {\rm (2.5.9)} \left. \begin{array}{rcl} \sigma_n &=& \sigma_x \cos^2 \varphi + \sigma_y \sin^2 \varphi = \frac{1}{2} (\sigma_x + \sigma_y ) + \frac{1}{2} (\sigma_x - \sigma_y ) \cos 2 \varphi \\ \tau &=& ( \sigma_x - \sigma_y) \sin \varphi \cos \varphi = \frac{1}{2} ( \sigma_x - \sigma_y) \sin 2 \varphi \end{array} \right\} \]式(2.5.9) におけるせん断応力の式において,$x$ 方向と $y$ 方向の垂直応力の差が用いられているが,これは,図2.5.7 より理解できるように傾斜面に作用しているせん断応力の向きが逆転していることによる.式(2.5.9.) において,$\varphi=0, 90度$ の場合せん断応力が $\tau=0$ となり,$\varphi=45, 135度$ でせん断応力が最大となることに留意されたい.
(2)互いに垂直な2方向に働くせん断応力が作用する場合
図2.5.8(a) に示すように,互いに垂直な2方向にせん断応力が作用した場合の任意断面における垂直応力とせん断応力を求めてみよう.ただし,$x$ および $y$ 方向のせん断応力の大きさは先に述べたように等しいため $\tau_{xy}$ としている.
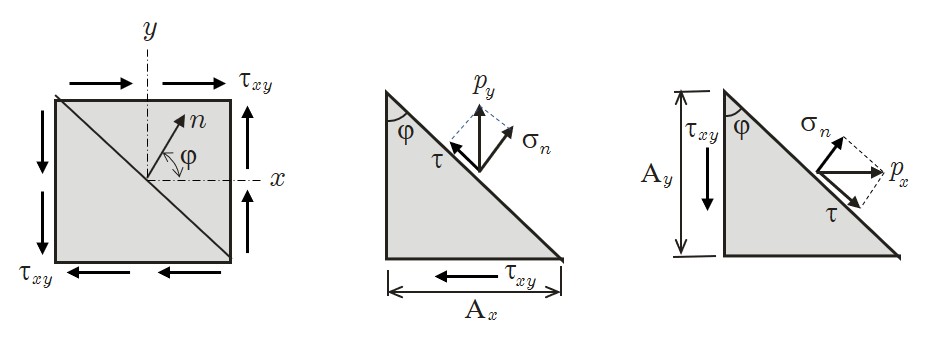
$\hspace{8em}$図2.5.8 互いに垂直なせん断応力
垂直応力が作用した場合と同様,図(b) ,図(c) のように $x$ 方向と $y$ 方向に分けて平衡条件を考える.
( $x$ 方向)
\[
{\rm (2.5.10)}
\left.
\begin{array}{rcl}
\sigma_n &=& p_x \cos \varphi = \tau_{xy} \sin \varphi \cos \varphi \\
\tau &=& p_x \sin \varphi = \tau_{xy} \sin^2 \varphi
\end{array}
\right\}
\]
\[
\hspace{5em} 但し \hspace{2em}
\left(
p_x \frac{A_x}{\sin \varphi}-\tau_c{xy} A_x = 0 \hspace{1em}
\therefore p_x = \tau_{xy} \sin \varphi
\right)
\]
( $y$ 方向)
\[ {\rm (2.5.11)} \left. \begin{array}{rcl} \sigma_n &=& p_y \cos \left( \displaystyle \frac{\pi}{2} - \varphi \right) = \tau_{xy} \cos \varphi \sin \varphi \\ \tau &=& p_y \sin \left( \displaystyle \frac{\pi}{2}\ - \varphi \right) = \tau_{xy} \cos^2 \varphi \end{array} \right\} \] \[ \hspace{5em} 但し \hspace{2em} \left( p_y \frac{A_y}{\cos \varphi}-\tau_{xy} A_y = 0 \hspace{1em} \therefore p_y = \tau_{xy} \cos \varphi \right) \] ここで,$A_x$ および $A_y$ はそれぞれの軸に垂直な面の断面積である.
先と同様,これらを重ね合わせた応力が全体の応力となることより,せん断応力の向きに注意して重ね合わせると以下の応力が得られる. \[ {\rm (2.5.12)} \left. \begin{array}{rcl} \sigma_n &=& 2 \tau_{xy} \sin \varphi \cos \varphi = \tau_{xy} \sin 2 \varphi \\ \tau &=& \tau_{xy} \sin^2 \varphi - \tau_{xy} \cos^2 \varphi = - \tau_{xy} \cos 2 \varphi \end{array} \right\} \]式(2.5.12) より,$\varphi=45度$ で最大の引張応力が生じ,そのときの値はせん断応力に等しいことが理解できる.一方,$\varphi=135度$ では最大の圧縮応力が生じる.また,$\varphi=0, 90度$ の場合,最大のせん断応力が生ずる.
(3)垂直応力とせん断応力が同時に作用する場合
図2.5.9 に示すように,2方向から,垂直応力とせん断応力が同時に作用した場合の任意断面に生ずる垂直応力とせん断応力を求めてみよう.
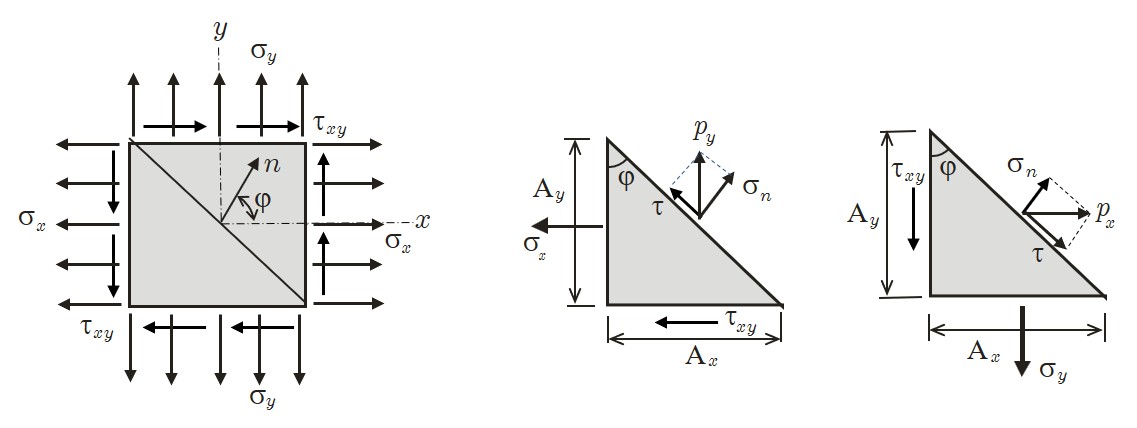
$\hspace{7em}$図2.5.9 垂直およびせん断応力が同時に作用した場合
これは,先の2つの状態の重ね合わせと考えることができるため,式(2.5.9) および式(2.5.12) より以下の関係が得られる.
\[
{\rm (2.5.13)}
\left.
\begin{array}{rcl}
\sigma_n &=& \frac{1}{2} (\sigma_x + \sigma_y )
+ \frac{1}{2} (\sigma_x - \sigma_y ) \cos 2 \varphi
+ \tau_{xy} \sin 2 \varphi \\
\tau &=& \frac{1}{2} ( \sigma_x - \sigma_y) \sin 2 \varphi
- \tau_{xy} \cos 2 \varphi
\end{array}
\right\}
\]
2.5.3 主応力
2.5.1節 において,単軸応力状態の主応力について述べた.ここでは,図2.5.9 のような応力が作用した場合の一般的な主応力について考えてみよう.
式(2.5.13) において,最大あるいは最小の $\sigma_n$ は,$\varphi$ で式(2.5.13) を微分することにより求まる.
\[
{\rm (2.5.14)}
\frac{d \sigma_n}{d \varphi} = -(\sigma_x - \sigma_y) \sin 2 \varphi
+ 2 \tau_{xy} \cos 2 \varphi
= 0
\]
式(2.5.14) より,最大あるいは最小の垂直応力をあたえる断面の傾斜角 $\varphi$ と応力の関係は,
\[
{\rm (2.5.15)}
\tan 2 \varphi = \frac{2 \tau_{xy}}{\sigma_x - \sigma_y}
\]
となる.式(2.5.15) は,
\[
\left.
\begin{array}{rcl}
\sin 2 \varphi &=& \displaystyle \frac{\tan 2 \varphi}{\sqrt{1 + \tan^2 2 \varphi}}
= \displaystyle \frac{2 \tau_{xy}}
{\sqrt{(\sigma_x-\sigma_y)^2 + 4 \tau^2_{xy}}} \\
\end{array}
\right\}
\]
\[
\left.
\begin{array}{rcl}
\cos 2 \varphi &=& \displaystyle \frac{1}{\sqrt{1 + \tan^2 2 \varphi}}
= \displaystyle \frac{\sigma_x - \sigma_y}
{\sqrt{(\sigma_x-\sigma_y)^2 + 4 \tau^2_{xy}}} \\
\end{array}
\right\}
\]
であり,この関係を式(2.5.13) に代入するとせん断応力は0となる.すなわち,主応力面においてせん断応力が0であることがわかる.
式(2.5.15) より主応力が生ずる方向が次のように求められる.
\[
{\rm (2.5.16)}
\varphi = \frac{1}{2} \tan^{-1} \frac{2 \tau_{xy}}{\sigma_x - \sigma_y} + \frac{n \pi}{2}
\]
この方向を主軸 (principal axis)という.主軸は互いに直交し,一方の軸で最大の垂直応力を,他方で最小の垂直応力を与える.これを $\sigma_1$,$\sigma_2$ で表し,その値は以下のようになる.
\[
{\rm (2.5.17)}
\left.
\begin{array}{rcl}
\sigma_1 ( = \sigma_{\rm max}) &=& \displaystyle
\frac{\sigma_x + \sigma_y}{2}
+ \sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
\\
\sigma_2 ( = \sigma_{\rm min}) &=& \displaystyle
\frac{\sigma_x + \sigma_y}{2}
- \sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
\end{array}
\right\}
\]
主応力と $x$,$y$ 軸方向の垂直応力には以下の関係がある.
\[
{\rm (2.5.18)}
\sigma_1 + \sigma_2 = \sigma_x + \sigma_y = 一定
\]
また,主応力を用いて任意断面の垂直応力ならびにせん断応力を表すことも可能で,以下のようになる.
\[
{\rm (2.5.19)}
\left.
\begin{array}{rcl}
\sigma_n &=& \displaystyle \frac{\sigma_1+\sigma_2}{2}
+ \frac{\sigma_1-\sigma_2}{2} \cos 2 \varphi \\
\tau &=& \displaystyle \frac{\sigma_1-\sigma_2}{2} \sin 2 \varphi
\end{array}
\right\}
\]
最大,最小の主応力はせん断応力の正負によって図2.5.10 に示す方向に生ずる.
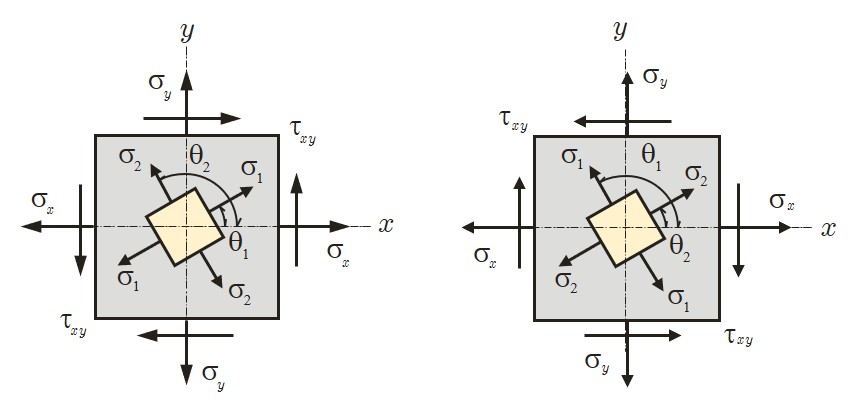
$\hspace{5em}$図2.5.10 せん断応力の正負による主応力の相違
図中,$\theta_1$ および $\theta_2$ は,それぞれ,主応力 $\sigma_1$,$\sigma_2$ の生ずる角度を表している.これを整理し,$\sigma_x$ と $\sigma_y$ の大小を考慮に入れて主軸の方向を整理した表を表2.5.1 に示す.
せん断応力についても,これまでと同様の議論を行うことができ,式(2.5.13) の $\tau$ の式を $\varphi$ で微分することにより,最大,最小のせん断応力を求めることができる.
\[
{\rm (2.5.20)}
\left.
\begin{array}{rcl}
\tau_1 ( = \tau_{\rm max}) &=& \displaystyle
\sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
\\
\tau_2 ( = \tau_{\rm min}) &=& \displaystyle
- \sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
\end{array}
\right\}
\]
これを,主せん断応力 (principal shearing stress)と呼んでいる.主せん断応力の生じる角度( $\varphi'$ )は以下の式によって与えられる.
\[
{\rm (2.5.21)}
\tan 2 \varphi' = -\frac{\sigma_x \sigma_y}{2 \tau_{xy}}
\]
主応力軸の式(2.5.15) と式(2.5.21) を比較することで,主応力面と主せん断応力面とは互いに $45^{\circ}$ の角をなすことが理解できる.
例題2.5.2
図2.5.9 において,$\sigma_x=98 {\rm MPa}$,$\sigma_y=-49 {\rm MPa}$,$\tau_{xy}=73.5 {\rm MPa}$ なる値のとき,主応力と主軸の方向を求めてみよう.主応力は式(2.5.17) を用いて以下のように計算される.
\[
\sigma_1 = \frac{\sigma_x + \sigma_y}{2}
+ \sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
= \frac{98-49}{2} + \sqrt{\left( \frac{98+49}{2} \right)^2 + 73.5^2}
= 128.4 \; {\rm MPa}
\]
\[
\sigma_2 = \frac{\sigma_x + \sigma_y}{2}
- \sqrt{\left( \frac{\sigma_x - \sigma_y}{2} \right)^2 + \tau^2_{xy}}
= \frac{98-49}{2} - \sqrt{\left( \frac{98+49}{2} \right)^2 + 73.5^2}
= - 79.4 \; {\rm MPa}
\]
また,主軸の方向は,式(2.5.16) より次のように求められる.
\[
\varphi = \frac{1}{2} \tan^{-1} \frac{2 \tau_{xy}}{\sigma_x - \sigma_y}
= \frac{1}{2} \tan^{-1} \frac{2 \times 73.5}{98+49}
= 22.5 ^{\circ}
\]
2.5.4 モールの応力円
$x$ および $y$ 軸方向の垂直応力と大きさが等しい2組のせん断応力が作用した場合の任意断面における垂直応力 $\sigma_n$ とせん断応力 $\tau$ は,断面の位置を指定する角 $\varphi$ の関数として以下のように与えられた. \[ {\rm (2.5.22)} \left. \begin{array}{rcl} \sigma_n &=& \displaystyle \frac{1}{2} (\sigma_x + \sigma_y ) + \frac{1}{2} (\sigma_x - \sigma_y ) \cos 2 \varphi + \tau_{xy} \sin 2 \varphi \\ \tau &=& \displaystyle \frac{1}{2} ( \sigma_x - \sigma_y) \sin 2 \varphi - \tau_{xy} \cos 2 \varphi \end{array} \right\} \] この式より,垂直応力とせん断応力を求めることもできるが,図式解法によっても容易に応力状態を知ることができる.
式(2.5.22) において,$\varphi$ を消去すると以下の式が得られる.
\[
{\rm (2.5.23)}
\left(
\sigma_n - \frac{\sigma_x+\sigma_y}{2}
\right)^2
+
\tau^2
=
\left(
\frac{\sigma_x-\sigma_y}{2}
\right)^2 + \tau^2_{xy}
\]
この式は,縦軸を $\sigma_n$,横軸を $\tau$ とし,半径が
\[
{\rm (2.5.24)}
r =
\sqrt{
\left(
\frac{\sigma_x-\sigma_y}{2}
\right)^2 + \tau^2_{xy}
}
\]
であり,中心が $\frac{\sigma_x+\sigma_y}{2}$ である円の方程式となっている.この円をモールの応力円 (Mohr’s stress circle)という.モールの応力円を図示すると図2.5.11 のようになる.せん断応力が0のとき,最大,最小主応力が図のように求まる.
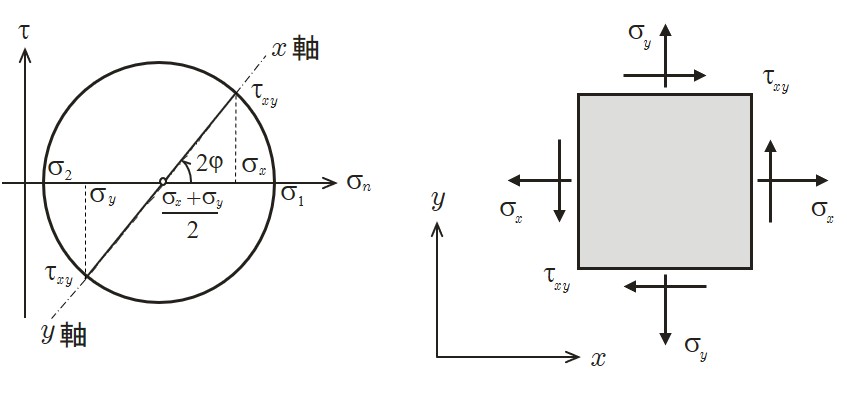
$\hspace{8em}$図2.5.11 モールの応力円
次に,いろいろな応力状態におけるモールの応力円を描いてみよう.
(1)$\tau_{xy} \gt 0$,$\sigma_x \gt \sigma_y$の場合
図2.5.12 に示すように,最大主応力の生ずる角 $\theta_1$ は $(0 \lt \theta_1 \lt \pi/4)$ の範囲にある.$\sigma_x$,$\sigma_y$ の正負はモールの円が水平方向に移動するだけであり,形状そのものに影響を与えることはない.

$\hspace{0em}$図2.5.12 $\tau_{xy} \gt 0$,$\sigma_x \gt \sigma_y$ の場合モールの円と主応力方向
(2)$\tau_{xy} \gt 0$,$\sigma_x \lt \sigma_y$の場合
(1)と $\sigma_x$,$\sigma_y$ の位置が逆転し,最大主応力の生ずる角 $\theta_1$ は $(\pi/4 \lt \theta_1 \lt \pi/2)$ の範囲にある.
$\hspace{0em}$図2.5.13 $\tau_{xy} \gt 0$,$\sigma_x \lt \sigma_y$ の場合モールの円と主応力方向
(3)$\tau_{xy} \lt 0$,$\sigma_x \lt \sigma_y$の場合
(1)と同様に見えるが,$\sigma_x$,$\sigma_y$ の位置が逆転していることに注意されたい.最大主応力の生ずる角 $\theta_1$ は $(\pi/2 \lt \theta_1 \lt 3\pi/4)$ の範囲にある.
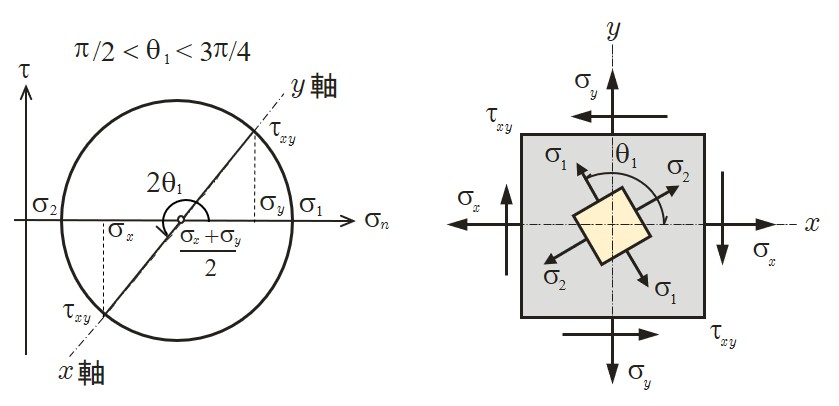
$\hspace{0em}$図2.5.14 $\tau_{xy} \lt 0$,$\sigma_x \lt \sigma_y$ の場合モールの円と主応力方向
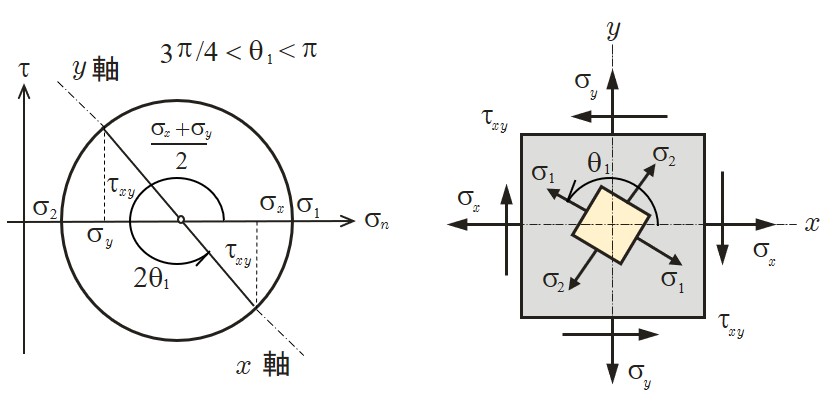
(4)$\tau_{xy} \lt 0$,$\sigma_x \gt \sigma_y$の場合
(2)と同様に見えるが,$\sigma_x$,$\sigma_y$ の位置が逆転していることに注意されたい.最大主応力の生ずる角 $\theta_1$ は $(3\pi/4 \lt \theta_1 \lt \pi)$ の範囲にある.
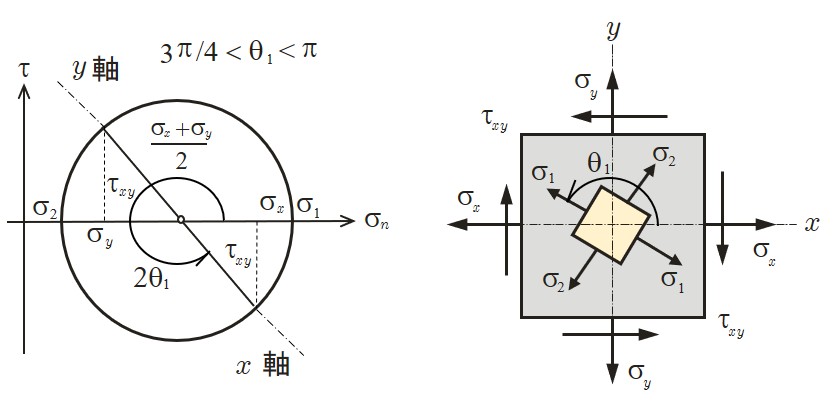
$\hspace{0em}$図2.5.15 $\tau_{xy} \lt 0$,$\sigma_x \gt \sigma_y$ の場合モールの円と主応力方向
例題2.5.3
断面積 $A=25cm^2$ の円柱が $49 {\rm kN}$ の力で圧縮されている.この応力状態をモールの応力円で表示し,$30^{\circ}$ の傾斜面での応力を求めて見よう.この円柱は単純な圧縮を受けており,その応力は次のように求められる.
\[
\sigma_x = \frac{P}{A}
= \frac{49 \times 10^3}{25 \times (10^{-2})^2}
= 19.6 \; {\rm MPa}
\]
\[
\sigma_y = \tau_{xy} = 0
\]
この値を用いて,モールの応力円の中心および半径は以下のように計算される.
\[
r = \sqrt{
\left(
\frac{\sigma_x-\sigma_y}{2}
\right)^2 + \tau^2_{xy}
}
= \frac{19.6}{2}
= 9.8 \; {\rm MPa}
\]
\[
(中心) \hspace{1em}
\left( \frac{\sigma_x+\sigma_y}{2} \right)
= \frac{19.6}{2}
= 9.8 \; {\rm MPa}
\]
したがって,モールの応力円は図2.5.16 のようになる.図からも理解できるように,最小主応力と $\sigma_x$ は同じ値である.
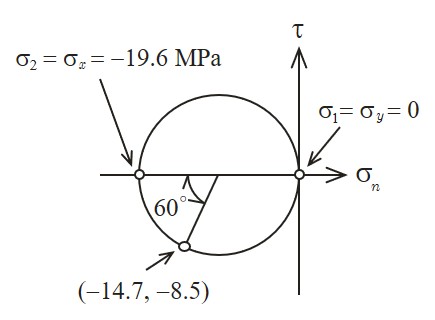
$\hspace{8em}$図2.5.16 単純圧縮
一方,$30^{\circ}$ の傾斜面は,モールの応力円上の $2\varphi=60^{\circ}$ の位置に該当するため,この面での垂直応力は $14.7 {\rm MPa}$ (圧縮),せん断応力は $-8.5 {\rm MPa}$ となる.これは,式(2.5.4) によっても求めることができるので検証されたい.
2.5.5 単純せん断
2.5.2(2)節 において,互いに共役な1組のせん断応力が作用する例を示した.このような状態を単純せん断 (simple shear)の状態にあるという.先に述べたように単純せん断状態では,最大の主応力は $45^{\circ}$ で生じ,その値は引張応力で,作用しているせん断応力と同じ値となる.また,最小の主応力は $135^{\circ}$ で生じ,せん断応力と同じ大きさを持つ圧縮応力となる.
\[
{\rm (2.5.25)}
\left.
\begin{array}{rcl}
\sigma_1 &=& \tau_{xy} \;\; ( \varphi=45^{\circ}) \\
\sigma_2 &=& -\tau_{xy}\;\; ( \varphi=135^{\circ})
\end{array}
\right\}
\]
単純せん断状態をモールの応力円により示すと図2.5.17 のようになる.
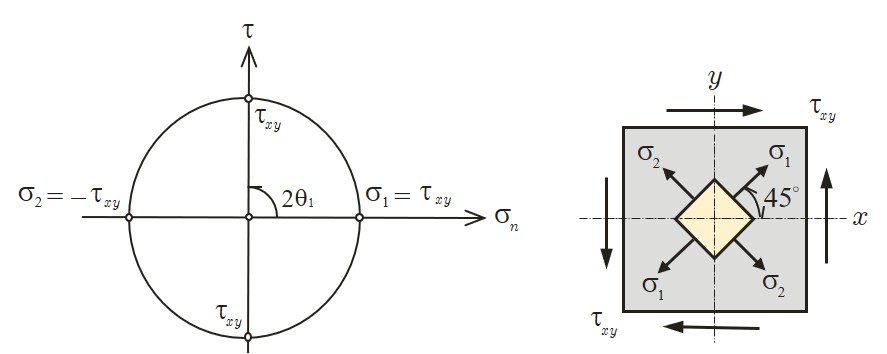
$\hspace{10em}$図2.5.17 単純せん断の状態
図2.5.17 より理解できるように,単純せん断状態では $x$ 軸に対して角度が $45^{\circ}$ と $135^{\circ}$ でせん断応力が0となる.このモールの応力円は図2.5.18 に示すように,$x$ 軸に $\sigma_1=\tau_{xy}$ の引張応力を,y軸に $\sigma_2=-\tau_{xy}$ の圧縮応力を作用させた場合と等価になる.
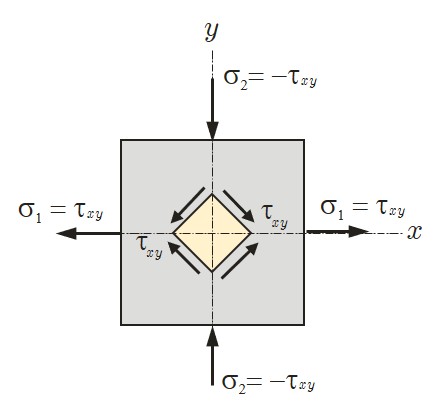
$\hspace{2em}$図2.5.18 等価な単純せん断
せん断の状態は,2.2節 で述べたリベットやボルトなど多くの実例がある.図2.5.17 のような載荷が難しい場合においても,図2.5.18 の載荷状態を利用することで単純せん断状態を再現するこっとができる.
2.5.6 応力の座標変換
図2.5.19 は直角座標系 $x-o-y$ を $\alpha$ なる角度だけ回転して得られる新たな直角座標系 $x'-o-y'$ を表している.
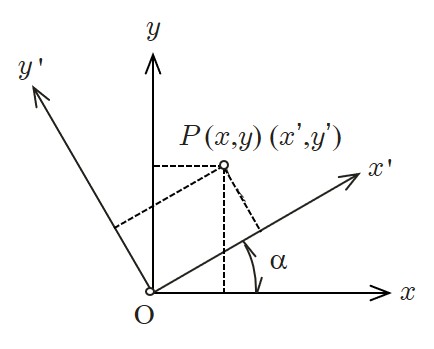
$\hspace{4em}$図2.5.19 座標系
いま,任意の点 $P$ の $x-o-y$ 座標系に関する座標値 $(x, y)$,$x'-o-y'$ 座標系に関する座標値を $(x', y')$ とすれば,両者の間に以下のような幾何学的な関係が成立する.
\[
{\rm (2.5.26)}
\left.
\begin{array}{rcr}
x' &=& \cos \alpha \cdot x + \sin \alpha \cdot y \\
y' &=& -\sin \alpha \cdot x + \cos \alpha \cdot y
\end{array}
\right\}
\]
これを,行列で整理すると以下のようになる.
\[
{\rm (2.5.27)}
\left\{
\begin{array}{c}
x' \\
y'
\end{array}
\right\}
=
\left[
\begin{array}{rr}
\cos \alpha & \sin \alpha \\
-\sin \alpha & \cos \alpha
\end{array}
\right]
\left\{
\begin{array}{c}
x \\
y
\end{array}
\right\}
\]
この行列を座標変換行列 と呼んでいる.
次に,応力の座標変換について考えてみよう.任意傾斜面に関する議論では,傾斜面の応力に関する座標系を図2.5.3 のようにとらえていた.応力の座標変換では,図2.5.19 のように座標系を考えるため,せん断応力の向きが逆転していることに注意しなければならない.図2.5.20 は座標軸の回転と応力の関係を示した図である.
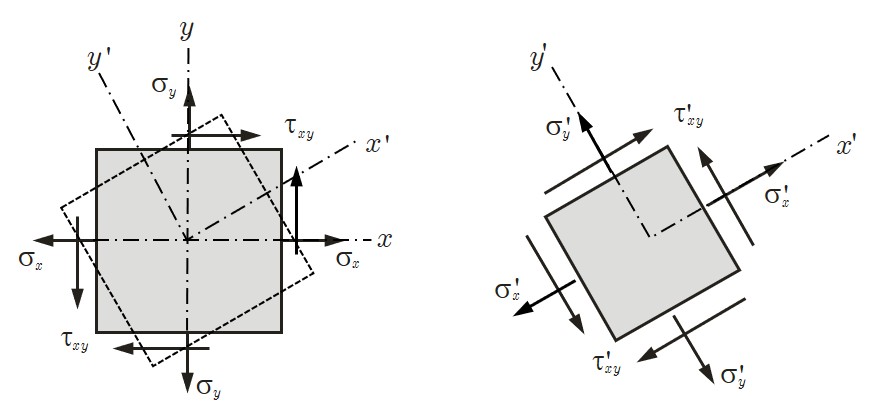
$\hspace{10em}$図2.5.20 応力の座標変換
この関係をもとに変換後の応力を求めると次のようになる.
\[
{\rm (2.5.28)}
\left.
\begin{array}{rcl}
\sigma'_x &=& \sigma_x \cos^2 \alpha
+ \sigma_y \sin^2 \alpha
+ 2 \tau_{xy} \sin \alpha \cos \alpha \\
\sigma'_y &=& \sigma_x \cos^2 (\frac{\pi}{2}-\alpha)
+ \sigma_y \sin^2 (\frac{\pi}{2}-\alpha)
+ 2 \tau_{xy} \sin (\frac{\pi}{2}- \alpha) \cos (\frac{\pi}{2}-\alpha ) \\
&=& \sigma_x \sin^2 \alpha
+ \sigma_y \cos^2 \alpha
- 2 \tau_{xy}\sin \alpha \cos \alpha \\
\tau'_{xy} &=& - \sigma_x \sin \alpha \cos \alpha
+ \sigma_y \sin \alpha \cos \alpha
+ \tau_{xy} (\cos^2 \alpha-\sin^2 \alpha)
\end{array}
\right\}
\]
これを,行列で表すと以下のように整理される.
\[
{\rm (2.5.29)}
\left[
\begin{array}{cc}
\sigma'_x & \tau'_{xy} \\
\tau'_{xy} & \sigma'_y
\end{array}
\right]
=
\left[
\begin{array}{rr}
\cos \alpha & \sin \alpha \\
-\sin \alpha & \cos \alpha
\end{array}
\right]
\left[
\begin{array}{cc}
\sigma_x & \tau_{xy} \\
\tau_{xy} & \sigma_y
\end{array}
\right]
\left[
\begin{array}{rr}
\cos \alpha & -\sin \alpha \\
\sin \alpha & \cos \alpha
\end{array}
\right]
\]
ここで,後ろの行列が座標変換行列の転置行列となっていることに注意されたい.このように応力の座標変換は,座標変換行列をもと応力の前後からかけることによって行うことができる.
例題2.5.4
図2.5.21 のように,$\sigma_x=19.6 {\rm MPa}$ の引張応力,$\sigma_y=49 {\rm MPa}$ の圧縮応力が作用した状態において,$30^{\circ}$ 座標軸を回転したときの応力を求めてみよう.

$\hspace{4em}$図2.5.21
式(2.5.29) によれば,以下のようになる.
\[
\left[
\begin{array}{cc}
\sigma'_x & \tau'_{xy} \\
\tau'_{xy} & \sigma'_y
\end{array}
\right]
=
\left[
\begin{array}{rr}
\cos 30^{\circ} & \sin 30^{\circ} \\
-\sin 30^{\circ} & \cos 30^{\circ}
\end{array}
\right]
\left[
\begin{array}{cc}
19.6 & 0 \\
0 & -49
\end{array}
\right]
\left[
\begin{array}{rr}
\cos 30^{\circ} & -\sin 30^{\circ} \\
\sin 30^{\circ} & \cos 30^{\circ}
\end{array}
\right]
\]
したがって,変換後の応力が以下のように求まる.
\[
\begin{array}{rcrl}
\sigma'_x &=& 2.45 \; {\rm MPa} \;\; &(引張)\\
\sigma'_y &=& -31.9 \; {\rm MPa} \;\; &(圧縮)\\
\tau'_{xy} &=& -29.7 \; {\rm MPa} &
\end{array}
\]
2.5.7 フックの法則の拡張
ひずみには縦ひずみと横ひずみがあることを2.1.4節 において説明した.いま,$x$ 軸方向のひずみを $\varepsilon_x$,$y$ 軸方向のひずみを $\varepsilon_y$ とすれば,図2.5.23(a) に示すように,$x$軸方向にのみ $\sigma_x$ が作用する場合,ひずみは次のようになる.
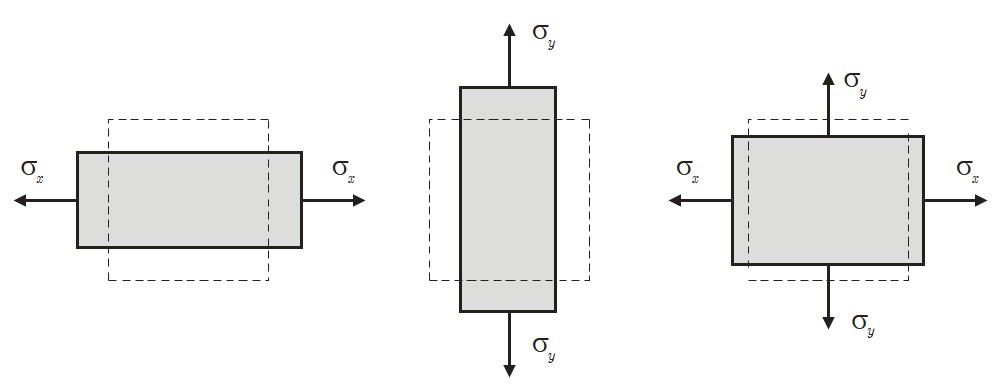
$\hspace{8em}$図2.5.22 応力とひずみの関係
\[
{\rm (2.5.30)}
\left.
\begin{array}{rcr}
\varepsilon_x &=& \displaystyle \frac{\sigma_x}{E} \\
\varepsilon_y &=& \displaystyle - \nu \frac{\sigma_x}{E} \\
\end{array}
\right\}
\]
ここで,$\nu$ はポアソン比で,$E$ は弾性係数である.
同様に,図(b) のように,$y$ 軸方向のみ $\sigma_y$ が作用する場合には次のようになる.
\[
{\rm (2.5.31)}
\left.
\begin{array}{rcr}
\varepsilon_x &=& \displaystyle - \nu \frac{\sigma_y}{E} \\
\varepsilon_y &=& \displaystyle \frac{\sigma_y}{E} \\
\end{array}
\right\}
\]
したがって,図(c)のように $\sigma_x$ と $\sigma_y$ が同時に作用する場合のひずみは次のようになる.
\[
{\rm (2.5.32)}
\left.
\begin{array}{rcr}
\varepsilon_x &=& \displaystyle \frac{1}{E}( \sigma_x - \nu \sigma_y) \\
\varepsilon_y &=& \displaystyle \frac{1}{E}( \sigma_y - \nu \sigma_x)
\end{array}
\right\}
\]
式(2.5.32) を応力について整理しなおすと,次の関係が得られる.
\[
{\rm (2.5.33)}
\left.
\begin{array}{rcr}
\sigma_x &=& \displaystyle \frac{1}{E}(\varepsilon_x + \nu \varepsilon_y) \\
\sigma_y &=& \displaystyle \frac{1}{E}(\varepsilon_y + \nu \varepsilon_x)
\end{array}
\right\}
\]
これは,等方,等質な材料の垂直応力および垂直ひずみの間の2次元のフックの法則 を表している.
2.5.8 主ひずみとモールのひずみ円
$x$ 軸,$y$ 軸方向の垂直ひずみを $\varepsilon_x$,$\varepsilon_y$ とし,せん断ひずみを $\gamma_{xy}$ とするとき,応力の場合と同様にひずみについても主ひずみの概念や,モールのひずみ円を描くことができる.ここでは,簡単にこれらの関係について説明する.
任意断面における縦ひずみを $\varepsilon$,せん断ひずみを $\gamma$ とするとき,以下の関係が得られる. \[ {\rm (2.5.34)} \left. \begin{array}{rcl} \varepsilon &=& \displaystyle \frac{1}{2} (\varepsilon_x + \varepsilon_y ) + \frac{1}{2} (\varepsilon_x - \varepsilon_y ) \cos 2 \varphi + \frac{1}{2} \gamma_{xy} \sin 2 \varphi \\ \displaystyle \frac{1}{2} \gamma &=& \displaystyle \frac{1}{2} ( \varepsilon_x - \varepsilon_y) \sin 2 \varphi - \frac{1}{2} \gamma_{xy} \cos 2 \varphi \end{array} \right\} \] この式の誘導は若干複雑であるためここでは省略するが, 応力の場合の式(2.5.13) と同じ表現となっている.
応力の場合と同様,式(2.5.34) における最大あるいは最小の縦ひずみを主ひずみ (principal strain)という.主ひずみ $\varepsilon_1$,$\varepsilon_2$ の誘導は式(2.5.34) における $\varepsilon$ の式を $\varphi$ により微分し,極値を求めることによって以下のように得られる.
\[
{\rm (2.5.35)}
\left.
\begin{array}{rcl}
\varepsilon_1 ( = \varepsilon_{\rm max}) &=& \displaystyle
\frac{\varepsilon_x + \varepsilon_y}{2}
+ \frac{1}{2} \sqrt{\left( \varepsilon_x-\varepsilon_y \right)^2+\gamma^2_{xy}}
\\
\varepsilon_2 ( = \varepsilon_{\rm min}) &=& \displaystyle
\frac{\varepsilon_x + \varepsilon_y}{2}
- \frac{1}{2} \sqrt{\left( \varepsilon_x-\varepsilon_y \right)^2+\gamma^2_{xy}}
\end{array}
\right\}
\]
また,$x$ 軸に対する主ひずみが生ずる方向についても以下のように求められる.
\[
{\rm (2.5.36)}
\varphi = \frac{1}{2} \tan^{-1} \frac{ \gamma_{xy}}{\varepsilon_x - \varepsilon_y}
\]
一方,式(2.5.34) から $\varphi$ を消去すると,次に示す円の方程式が得られる.
\[
{\rm (2.5.37)}
\left(
\varepsilon - \frac{\varepsilon_x+\varepsilon_y}{2}
\right)^2
+
\left(
\frac{\gamma}{2}
\right)^2
=
\left(
\frac{\varepsilon_x-\varepsilon_y}{2}
\right)^2
+
\left(
\frac{\gamma_{xy}}{2}
\right)^2
\]
この円は,モールのひずみ円 (Mohr’s strain circle)と呼ばれており,円の中心は $\frac{\varepsilon_x+\varepsilon_y}{2}$ で,半径は以下に示す値である.
\[
{\rm (2.5.38)}
r = \frac{1}{2}
\sqrt{ \left( \varepsilon_x-\varepsilon_y \right)^2 + \gamma^2_{xy}
}
\]
この円の方程式を図示した図が図2.5.23 である.
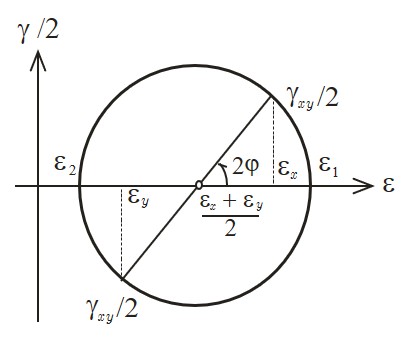
$\hspace{2em}$図2.5.23 モールのひずみ円
いま,各部材の変形が非常に小さいとする,微小変形の仮定のもとに,節点に荷重が作用した場合の各部材に生じる軸方向の力ならびに変位を求めてみよう.解析にあたり,図2.2.8に示す構造を図2.2.9に示すように骨組線によって表す.
一方,軸方向力は適合条件,変形条件を用いて次のように求まる. \[ N_1 = N_3 = \frac{E_1A_1}{l_1}\cos \alpha \frac{P}{\left( 2 \frac{E_1A_1}{l_1}\cos^2 \alpha + \frac{E_2A_2}{l_2}\right)} \] \[ N_2 = \frac{E_2A_2}{l_2} \frac{P}{\left( 2 \frac{E_1A_1}{l_1}\cos^2 \alpha + \frac{E_2A_2}{l_2}\right)} \]
2.3 せん断応力
弾性限度内ではせん断応力 $\tau$ とせん断ひずみ $\gamma$ の比が一定であり,以下に示すフックの法則が成立する. \[ {\rm (2.3.3)} \tau = G \cdot \gamma \] ここで,$G$ は
次に,微小六面体に,
リベットやボルト等によって,複数の部材を接合する方法に
これまで述べてきたことをまとめる意味で,せん断応力と軸応力の比較を行ってみよう. せん断応力,せん断ひずみ,フックの法則は,それぞれ,
2.4 棒材のねじり
このせん断応力によって生ずるねじりモーメントは,外力として作用させたねじりモーメント $T$ と釣り合っていなけばならない.
肉厚の厚い中空丸棒に生ずるせん断応力を求めてみよう.
比ねじり角 $\theta$ は単位長さあたりのねじれ角であるから,ねじれ角は比ねじれ角に長さ $l$ をかけることで求めるこたができる. \[ \varphi = \theta \cdot l = \frac{32}{\pi \left( d_1^4 - d_2^4 \right)} \cdot \frac{T}{G} \cdot l = \frac{32}{\pi \left( 0.1^4 - 0.06^4 \right)} \cdot \frac{49 \times 10^3}{79.4 \times 10^9} \cdot 1 = 0.0722 \; {\rm rad} = 4.1 \; {\rm deg} \]
円形断面以外の断面を持つ棒材にねじりモーメントが作用した場合,中心軸線に垂直な断面は,変形後に円形断面のように平面を保持することができなくなる.このため,せん断応力の分布は中心軸からの距離に単純に比例することはない.サン・ブナン(Saint Venant)はこれらの問題に対する解法を与えた.ここでは,簡単のこの研究を紹介する.
正方形断面の場合,最大せん断応力は辺の中点で生じ,1辺の長さを $a$ としたとき,以下のように与えられる. \[ {\rm (2.4.14)} \tau_{\rm max} = \frac{T}{0.208 a^3} = 4.80 \frac{T}{a^3} \] また,比ねじれ角は以下の式で与えられる. \[ {\rm (2.4.15)} \theta = \frac{T}{0.141 a^4 G} = 7.09 \frac{T}{a^4 G} \] このときの変形は
1辺の長さが $a$,他辺の長さが $b$ の長方形断面の場合,正方形断面の一般形として,最大せん断応力および比ねじれ角が以下のように与えられる. \[ {\rm (2.4.16)} \left. \begin{array}{rcl} \tau_{1 {\rm max}} &=& \displaystyle \frac{1}{k_1} \cdot \frac{T}{ab^2} \\ \tau_{2 {\rm max}} &=& k_2 \cdot \tau_{1 {\rm max}} \\ \theta &=& \displaystyle \frac{1}{k_3} \cdot \frac{T}{ab^3} \cdot \frac{1}{G} \end{array} \right\} \]
| a/b | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 4.0 | 5.0 | 10.0 | $\infty$ |
|---|---|---|---|---|---|---|---|---|---|
| $k_1$ | 0.208 | 0.231 | 0.246 | 0.258 | 0.267 | 0.282 | 0.292 | 0.312 | 0.333 |
| $k_2$ | 1.000 | 0.859 | 0.759 | 0.766 | - | 0.745 | 0.743 | 0.743 | 0.743 |
| $k_3$ | 0.141 | 0.196 | 0.229 | 0.249 | 0.263 | 0.281 | 0.291 | 0.312 | 0.333 |
薄肉中空断面の場合,せん断応力が断面上に等分布すると仮定し,最大せん断応力,比ねじり角を求める.
$\hspace{2em}$2.5 組合せ応力と平面問題
以上のような面の傾きに依存する応力 $p$ を,
このように,一様断面を持つ棒材に単純に引張力を作用させた場合においても,軸に垂直な面では垂直応力が発生するだけであるが,その他の断面では垂直応力以外に断面をせん断しようとするせん断応力が発生する.
さて,図のような応力のうち幾つか,あるいはすべてが作用した場合の任意断面における応力を求めてみよう.
\[ {\rm (2.5.8)} \left. \begin{array}{rcl} \sigma_n &=& p_y \cos \left( \displaystyle \frac{\pi}{2} - \varphi \right) = \sigma_y \sin^2 \varphi \\ \tau &=& p_y \sin \left( \displaystyle \frac{\pi}{2}\ - \varphi \right) = \sigma_y \sin \varphi \cos \varphi \end{array} \right\} \] \[ \hspace{5em} 但し \hspace{2em} \left( p_y \frac{A_x}{\sin \varphi}-\sigma_y A_x = 0 \hspace{1em} \therefore p_y = \sigma_y \sin \varphi \right) \] これらの垂直応力ならびにせん断応力を重ね合わせた応力が全体の応力になることより,最終的に以下の応力が求まる. \[ {\rm (2.5.9)} \left. \begin{array}{rcl} \sigma_n &=& \sigma_x \cos^2 \varphi + \sigma_y \sin^2 \varphi = \frac{1}{2} (\sigma_x + \sigma_y ) + \frac{1}{2} (\sigma_x - \sigma_y ) \cos 2 \varphi \\ \tau &=& ( \sigma_x - \sigma_y) \sin \varphi \cos \varphi = \frac{1}{2} ( \sigma_x - \sigma_y) \sin 2 \varphi \end{array} \right\} \]
\[ {\rm (2.5.11)} \left. \begin{array}{rcl} \sigma_n &=& p_y \cos \left( \displaystyle \frac{\pi}{2} - \varphi \right) = \tau_{xy} \cos \varphi \sin \varphi \\ \tau &=& p_y \sin \left( \displaystyle \frac{\pi}{2}\ - \varphi \right) = \tau_{xy} \cos^2 \varphi \end{array} \right\} \] \[ \hspace{5em} 但し \hspace{2em} \left( p_y \frac{A_y}{\cos \varphi}-\tau_{xy} A_y = 0 \hspace{1em} \therefore p_y = \tau_{xy} \cos \varphi \right) \] ここで,$A_x$ および $A_y$ はそれぞれの軸に垂直な面の断面積である.
先と同様,これらを重ね合わせた応力が全体の応力となることより,せん断応力の向きに注意して重ね合わせると以下の応力が得られる. \[ {\rm (2.5.12)} \left. \begin{array}{rcl} \sigma_n &=& 2 \tau_{xy} \sin \varphi \cos \varphi = \tau_{xy} \sin 2 \varphi \\ \tau &=& \tau_{xy} \sin^2 \varphi - \tau_{xy} \cos^2 \varphi = - \tau_{xy} \cos 2 \varphi \end{array} \right\} \]
| せん断応力 | 垂直応力 | 主軸の方向 | 主軸の範囲 |
|---|---|---|---|
| $\tau_{xy} \gt 0$ | $\sigma_x \gt \sigma_y$ | $\varphi = \varphi$ | $0 \lt \varphi \lt \pi/2$ |
| $\sigma_x \lt \sigma_y$ | $\varphi = \pi/2 - \varphi$ | ||
| $\tau_{xy} \lt 0$ | $\sigma_x \lt \sigma_y$ | $\varphi = \pi/2 + \varphi$ | $\pi/2 \lt \varphi \lt \pi$ |
| $\sigma_x \gt \sigma_y$ | $\varphi = \pi - \varphi$ |
$x$ および $y$ 軸方向の垂直応力と大きさが等しい2組のせん断応力が作用した場合の任意断面における垂直応力 $\sigma_n$ とせん断応力 $\tau$ は,断面の位置を指定する角 $\varphi$ の関数として以下のように与えられた. \[ {\rm (2.5.22)} \left. \begin{array}{rcl} \sigma_n &=& \displaystyle \frac{1}{2} (\sigma_x + \sigma_y ) + \frac{1}{2} (\sigma_x - \sigma_y ) \cos 2 \varphi + \tau_{xy} \sin 2 \varphi \\ \tau &=& \displaystyle \frac{1}{2} ( \sigma_x - \sigma_y) \sin 2 \varphi - \tau_{xy} \cos 2 \varphi \end{array} \right\} \] この式より,垂直応力とせん断応力を求めることもできるが,図式解法によっても容易に応力状態を知ることができる.
(1)と $\sigma_x$,$\sigma_y$ の位置が逆転し,最大主応力の生ずる角 $\theta_1$ は $(\pi/4 \lt \theta_1 \lt \pi/2)$ の範囲にある.
(1)と同様に見えるが,$\sigma_x$,$\sigma_y$ の位置が逆転していることに注意されたい.最大主応力の生ずる角 $\theta_1$ は $(\pi/2 \lt \theta_1 \lt 3\pi/4)$ の範囲にある.
(2)と同様に見えるが,$\sigma_x$,$\sigma_y$ の位置が逆転していることに注意されたい.最大主応力の生ずる角 $\theta_1$ は $(3\pi/4 \lt \theta_1 \lt \pi)$ の範囲にある.
次に,応力の座標変換について考えてみよう.任意傾斜面に関する議論では,傾斜面の応力に関する座標系を
ひずみには縦ひずみと横ひずみがあることを
同様に,
$x$ 軸,$y$ 軸方向の垂直ひずみを $\varepsilon_x$,$\varepsilon_y$ とし,せん断ひずみを $\gamma_{xy}$ とするとき,応力の場合と同様にひずみについても主ひずみの概念や,モールのひずみ円を描くことができる.ここでは,簡単にこれらの関係について説明する.
任意断面における縦ひずみを $\varepsilon$,せん断ひずみを $\gamma$ とするとき,以下の関係が得られる. \[ {\rm (2.5.34)} \left. \begin{array}{rcl} \varepsilon &=& \displaystyle \frac{1}{2} (\varepsilon_x + \varepsilon_y ) + \frac{1}{2} (\varepsilon_x - \varepsilon_y ) \cos 2 \varphi + \frac{1}{2} \gamma_{xy} \sin 2 \varphi \\ \displaystyle \frac{1}{2} \gamma &=& \displaystyle \frac{1}{2} ( \varepsilon_x - \varepsilon_y) \sin 2 \varphi - \frac{1}{2} \gamma_{xy} \cos 2 \varphi \end{array} \right\} \] この式の誘導は若干複雑であるためここでは省略するが, 応力の場合の
応力の場合と同様,