1.1.1 力の三要素
橋や建物などの構造物を設計する場合,その構造物にどのような力が作用しているか予め知っておく必要がある.このような,ある物体に働く力や運動の関係を扱うのが力学である.本章では特に静止した剛体に働く力の関係について述べることにする.このような問題を扱う力学のことを
静力学(statics) という.
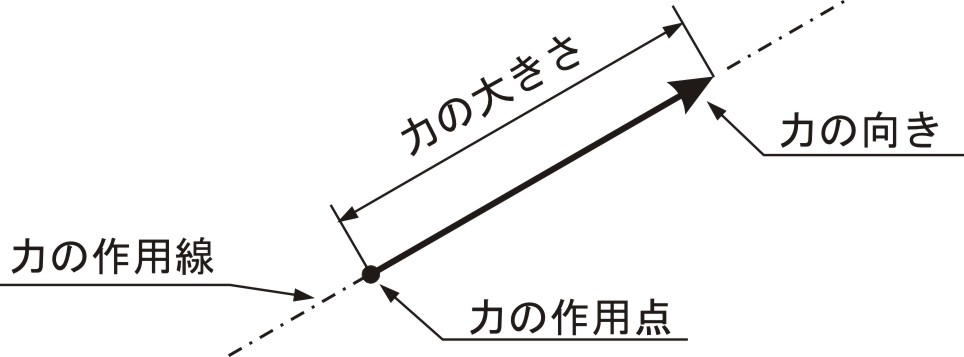
ある固体に力が働いた状態を考えてみよう.このとき,単に大きさだけでその力を表現することはできない.たとえば,同じ大きさの力であっても,その固体を右に引っ張るのか,左に引っ張るのかではその効果はまったく異なるし,また,どこを持って引っ張るかによっても挙動は異なる.このように一つの力を表現するためには
1)力の大きさ (magnitude)
2)方向 (direction),向き (sense)
3)力の作用位置 (position)
を示す必要がある.これら,三つの要素のことを
力の三要素 と呼んでいる.数学において,大きさと方向を持つ量のことをベクトルと呼んでいたが,力も大きさと方向を持つ量であるからベクトル量となる.
$\hspace{8em}$図1.1.1 力の定義
図1.1.1 は1つの力を表記した図である.力もベクトル量となることから,通常のベクトルと同様,矢印を用いて表す.力を示す記号は太字の $\boldsymbol{P}$ や上矢印付きの などのように,ベクトル記号を用いるべきであるが,混乱しない場合は単にPと書いている書籍も見受けられる.また,力の単位は工学単位系の場合,${\rm gf,kgf,tf}$ が用いられており,SI単位系の場合には ${\rm N}$
(ニュートン) が利用される.本書では特に断らない限り,SI単位系により説明する.
1.1.2 力の種類
力学において扱われる力には次に示すような力がある.
1)物体の接触面に働く力
2)物体全体に働く力
3)物体の内部に働く力
4)電気,磁気による力
ここでは (1) (2) の2種類の力について考えてみよう.
1)物体の接触面に働く力
図1.1.2 に示すように,2つの物体がある1点Qにおいて接触する場合,この点を通して力をおよぼし合う.もし,2つの力が接触面に立てた法線と一致しなければ摩擦力が働いていることになる.
$\hspace{2em}$図1.1.2 表面力
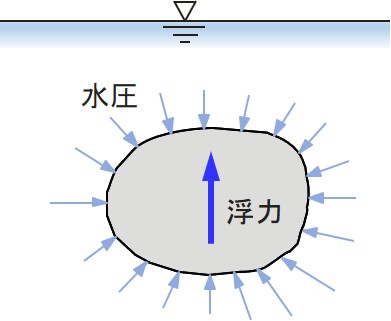
図1.1.3 に示す水圧などもこの1つであり,水と物体との接触面において働いている力である.この水圧の合力のことを
浮力 (buoyancy)と呼んでいる.このように,物体の接触面を通して表面に働く力を
表面力 (surface force)と呼ぶ.
$\hspace{2em}$図1.1.3 水圧と浮力
2)物体全体に働く力
重力 (万有引力)は物体に働く力の最も典型的な例であろう.この力は,物体内部のいたるところに働いている.このことから,物体全体に働く力のことを
体積力 (body force)と呼んでいる.体積力のもう一つの例として
慣性力 (inertial force)がある.自動車に乗っていて急にブレーキを踏むと体が進行方向に力を受けていることを体験した人は多いであろう.このような力が慣性力である.地震によっても建物に慣性力が生じ,時として大きな災害をもたらすことがある.このように,慣性力は運動学と密接な関係があり,詳細については
1.1.4節 において説明する.
一方,力をその働きにより分類することもできる.その代表的な例が
4章 で説明する
反力(抗力) (reaction) である.机の上に置かれた物体が静止していられるのは,その物体を支える力が机から物体に作用しているためであり,このような力のことを反力と呼んでいる.
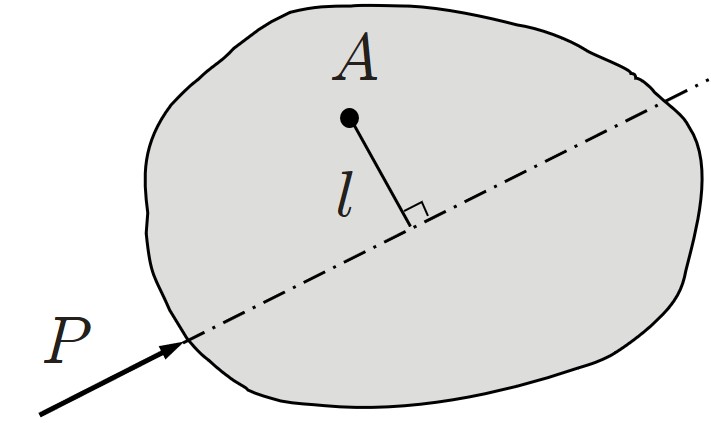
1.1.3 力のモーメントと偶力 1)力のモーメント
図1.1.4 に示すように,物体のある点 $A$ を支え荷重 $P$ を作用させると物体は回転しようとする.この回転力を量的に示したものが
力のモーメント (moment of force) である.
$\hspace{2em}$図1.1.4 力のモーメント
ある点 $A$ における力のモーメント $M$ は
\[
{\rm (1.1.1)}
M = P \times l
\]
と表すことができる.ここで,$P$ は力の大きさであり,$l$ はある点 $A$ から力の作用線へ下した垂線の高さである.力のモーメントの符号は時計回り,あるいは反時計回りに物体を回転させようとする力により決めるが,どちらを正とするかは問題や座標系の考え方により異なるが,一般的には反時計回りを正とする場合が多い.
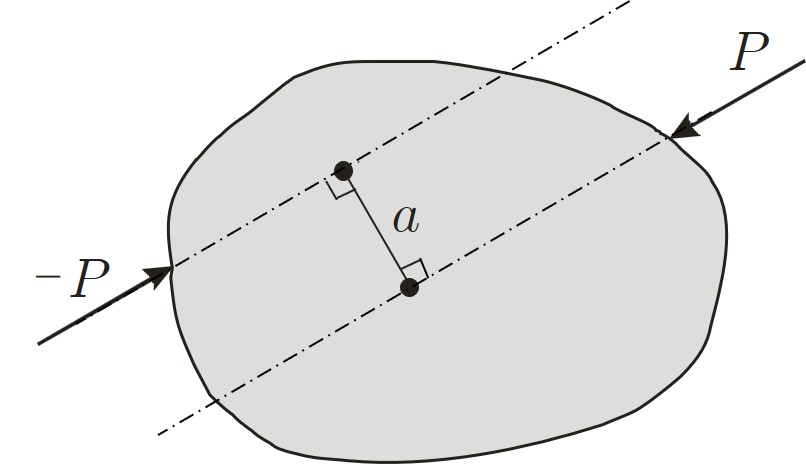
2)偶力
もし,
図1.1.5 に示すような,大きさが等しく,平行な作用線を持つ向きが反対な2力が物体に作用していたとしよう.このような2つの力を対にして
偶力 (couple of force) と呼んでいる.この偶力によっても物体は回転しようとする.そこで,
$\hspace{4em}$図1.1.5 偶力
\[
{\rm (1.1.2)}
M = P \times a
\]
を
偶力のモーメント とよび,その偶力の大きさを表す.ここで,$a$ は2つの平行な力の作用線に下した垂線の高さであり,$P$ は偶力である.
1.1.4 剛体に働く力の基本法則
剛体に働く力に対する静力学の基本法則として以下の3つがある.
1)力の移動性の法則
2)平行四辺形の法則
3)作用と反作用の法則
ここでは,これら3つの法則について説明を行う.
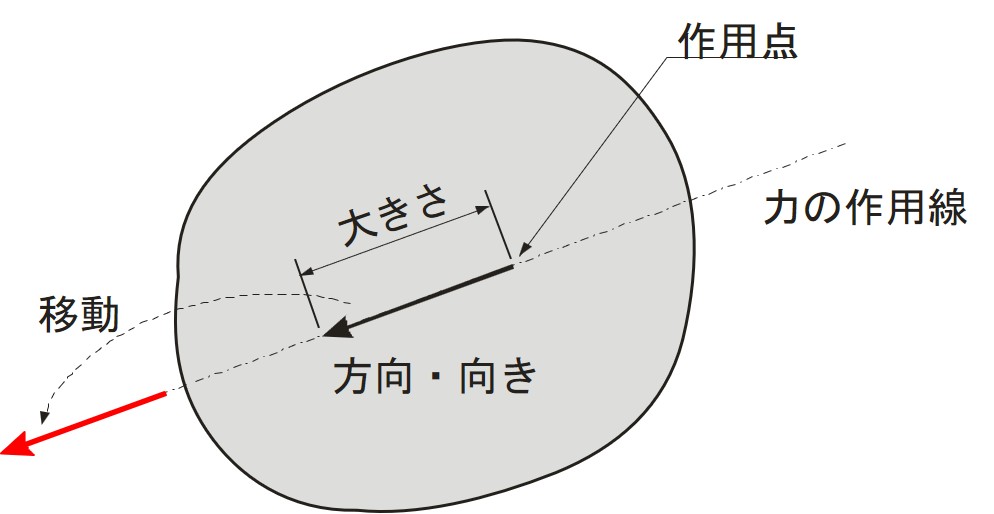
1)力の移動性の法則
図1.1.6 に示すように剛体に働く力は,その大きさおよび方向,向きを変えなければ,その作用点を力の作用線上の任意の点に移動することができる.これを
力の移動性の法則 と呼んでいる.
$\hspace{4em}$図1.1.6 力の移動
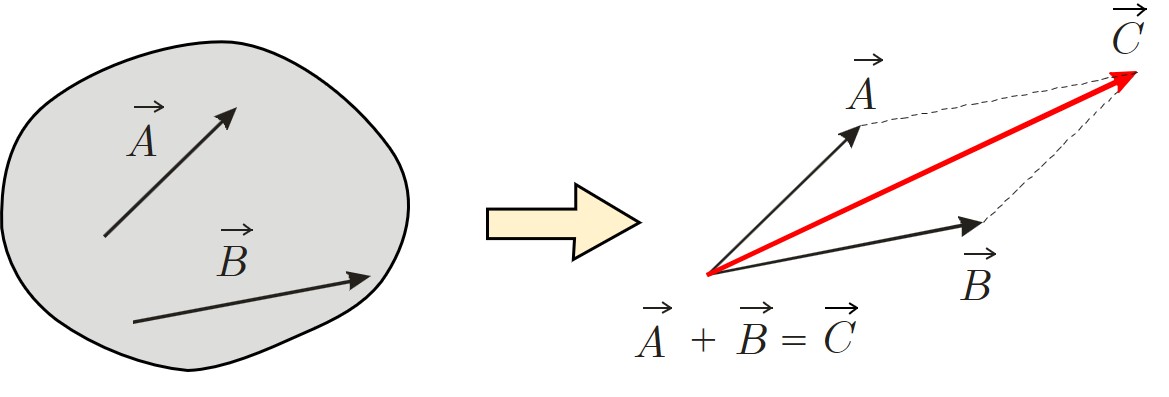
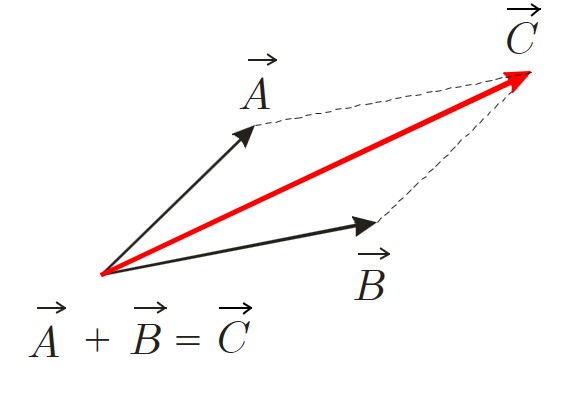
2)平行四辺形の法則
図1.1.7 に示すように剛体内に2力 $\vec{A}$,$\vec{B}$ が作用したとしよう.このとき,この2力の効果は,その2力を2辺とする平行四辺形の対角線の大きさと方向,向きを持つ1つの力で表現することができる.これを
平行四辺形の法則 と呼んでいるが,このことはベクトルの和や差を考えれば理解が容易であろう.
$\hspace{6em}$図1.1.7 平行四辺形の法則
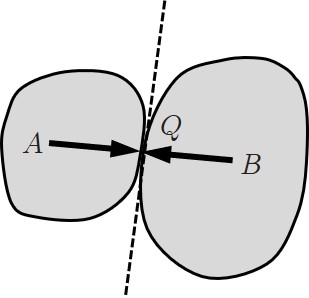
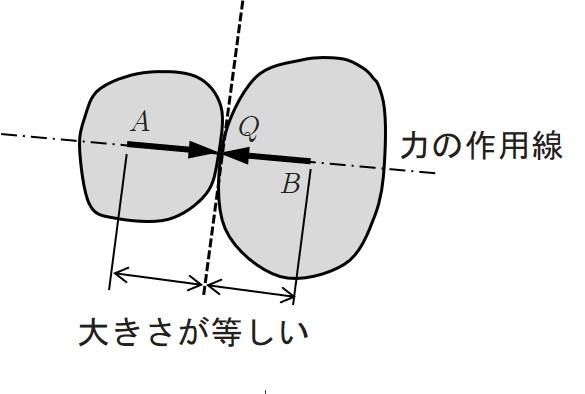
3)作用と反作用の法則
図1.1.8 に示すように2つの物体 $A$,$B$ が点 $Q$ において接触していたとしよう.このとき,物体 $A$ が物体 $B$ におよぼす力と,物体 $B$ が物体 $A$ におよぼす力はその作用線および大きさが等しく作用方向が逆向きとなる.これを
作用反作用の法則 という.机の上にある物体を置いたとき,その物体がそこに静止しているのは,作用反作用の法則により机から物体に作用線と大きさが等しく逆向きの力が働いているためである.
$\hspace{2em}$図1.1.8 作用反作用の法則
1.2.1 力の合成
ある物体に多くの力が作用していたとする.このとき,これらの力と同一効果を示す一つの力が求められたとき,その力のことを
合力 (resultant force) と呼ぶ.最も簡単な例として先の平行四辺形の法則がある.
$\hspace{4em}$図1.2.1 力の合成
図1.2.1 は2力 $\vec{A}$,$\vec{B}$ が作用しているとき,その合力が $\vec{C}$ となることを示した図である.この図は,
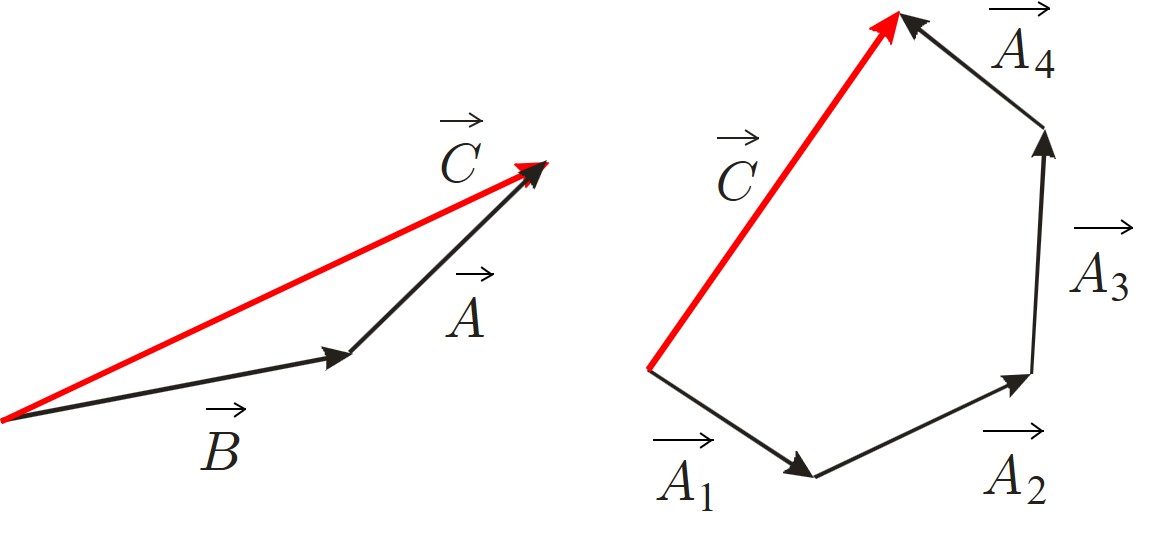
図1.2.2(a) のように描くこともできる.これを
力の三角形 (triangle of forces)と呼んでいる.力がいくつも作用していれば,
図1.2.2(b) に示すような力の多角形が形成される.このように,合力を求めることを
力の合成 (composition of force)と呼ぶ.
$\hspace{4em}{\rm (a)} \hspace{8em}{\rm (b)}$
$\hspace{5em}$図1.2.2 力の三角形
1.2.2 力の分解
力の合成では多くの力を1つの力に置き換えた.一方,
力の分解 (decomposition of force)は,1つの力をそれと同一効果を示す多くの力に置き換えることを意味する.このようにして得られた力のことを力の合成における合力に対し,
分力 (component force) と呼んでいる.
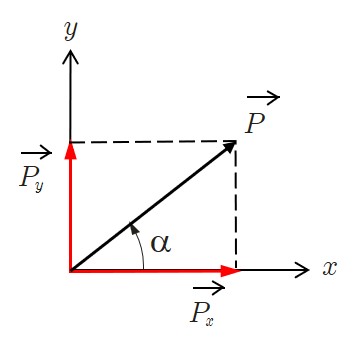
力の分解の最も典型的な例として直角座標系への分解がある.
図1.2.3 は力 $\vec{P}$ を $x$ 軸,$y$ 軸方向へ分解した分力 $\vec{P}_x$,$\vec{P}_y$ を示した図である.いま,力 $\vec{P}$,$\vec{P}_x$,$\vec{P}_y$ の大きさを$P$,$P_x$,$P_y$ とするなら
\[
{\rm (1.2.1)}
\left.
\begin{array}{rcl}
P_x &=& P \cos \alpha \\
P_y &=& P \sin \alpha
\end{array}
\right\}
\]
なる関係が成立することは明かである.このようにして求まった分力の大きさ $P_x$,$P_y$ を力 $\vec{P}$ の $x$ 方向と $y$ 方向の
成分 と呼ぶ.ベクトルと同様,これらの関係を $(P_x,P_y)$ と書くこともある.
$\hspace{3em}$図1.2.3 力の分解
ここで,再度,力の合成について考えてみよう.
図1.2.3 において$ P_x$,$P_y$ が解っていたとする.このとき,$\vec{P}_x$,$\vec{P}_y$ による合力は
\[
{\rm (1.2.2)}
\left.
\begin{array}{lrcl}
(合力の大きさ)& P &=& P \sqrt{P_x^2 + P_y^2} \\
(合力の方向) & \alpha &=& \tan^{-1} \displaystyle \frac{P_y}{P_x}
\end{array}
\right\}
\]
として求めることができる.
以上のように,直角座標系を利用した力の合成,分解は直感的でもあり,また計算も行いやすいため非常によく利用される.次にこの直角座標系を利用して力の合成,分解を行い合力を求めてみよう.
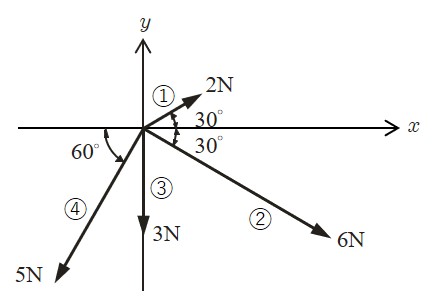
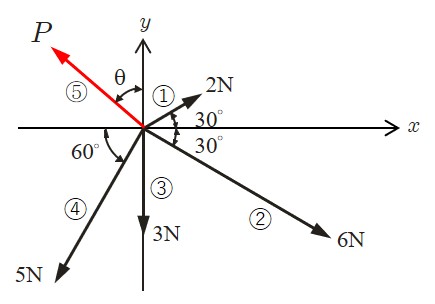
図1.2.4 のような4つの力の合力を求めるため,それぞれの力をxおよびy方向の成分に分解する.
$\hspace{3em}$図1.2.4 合力の計算例
番号
$P_x {\rm (N)}$
$P_y {\rm (N)}$
①
$2 \cos 30^{\circ}$
1.732
$2 \sin 30^{\circ}$
1.000
②
$6 \cos 30^{\circ}$
5.196
$-6 \sin 30^{\circ}$
-3.000
③
-
0.000
-
-3.000
④
$-5 \cos 60^{\circ}$
-2.500
$-5 \sin 60^{\circ}$
-4.330
$\sum$
-
4.428
-
-9.330
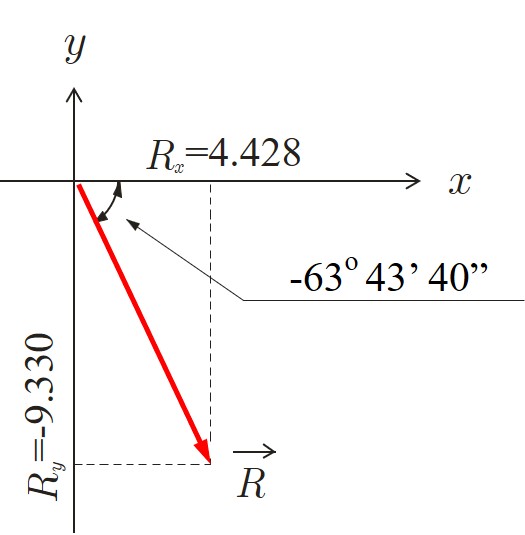
これらの和を求めると,すなわち,力の合成を行うと,合力 $\vec{R}$ の $x$ 方向成分 $R_x$ および $y$ 方向成分 $R_y$ が以下のように求まる.
\[
\left.
\begin{array}{rcr}
R_x &=& 4.428 \; {\rm N} \\
R_y &=& -9.330 \; {\rm N}
\end{array}
\right\}
\]
したがって,合力の大きさと方向は以下のようになる.
\[
\begin{array}{rcl}
R &=& \sqrt{R_x^2+R_y^2} = 10.327 \; {\rm N} \\
\theta &=& \tan^{-1} \displaystyle \frac{R_y}{R_x} = -64^{\circ} 36' 40"
\end{array}
\]
ここで,注意を行わなければならないことは,$\theta$ がどのように測った角度なのかを明確にしておくことである.この例題の場合は,
図1.2.5 のように $\theta$ を考えている.
$\hspace{0em}$図1.2.5 合力の大きさと方向
1.2.3 1点に会する力のつり合い
$x-y$ 平面上にある多くの力がある1点に会する場合,これらの力がつり合うためには以下の条件を満足しなければならない.
\[
\left.
\begin{array}{rcl}
\sum X &=& 0 \\
\sum Y &=& 0
\end{array}
\right\}
\hspace{2em}
または
\hspace{2em}
\left\{
\begin{array}{rcll}
\sum H &=& 0 & (水平方向の力のつり合い)\\
\sum V &=& 0 & (鉛直方向の力のつり合い)
\end{array}
\right.
\]
ここで,$\sum X$ および $\sum Y$ は,それぞれ,力の $x$ 方向成分の和,$y$ 方向成分の和である.この条件は
物体が並進運動を起こさない条件 であり,力が1点に会する場合は回転運動を起こさないため,この2つの条件だけでつり合い条件を満足する.
前節において合力を求めた同じ問題について,これらの力とつり合う力を求めてみよう.
図1.2.6 はつり合う力 $P$ が表に加わっている他,前の問題と同じである.それぞれの力を $x$ および $y$ 方向に分解してみよう.
$\hspace{2em}$図1.2.6 つり合い力の計算例
番号
$P_x {\rm (N)}$
$P_y {\rm (N)}$
①
$2 \cos 30^{\circ}$
1.732
$2 \sin 30^{\circ}$
1.000
②
$6 \cos 30^{\circ}$
5.196
$-6 \sin 30^{\circ}$
-3.000
③
-
0.000
-
-3.000
④
$-5 \cos 60^{\circ}$
-2.500
$-5 \sin 60^{\circ}$
-4.330
⑤
-
$P_x$
-
$P_y$
すべての力がつり合うためには各成分の和が 0 になればよい.
\[
\begin{array}{rcrcl}
\sum X &=& 4.428+P_x &=& 0 \\
\sum Y &=& -9.330+P_y &=& 0
\end{array}
\]
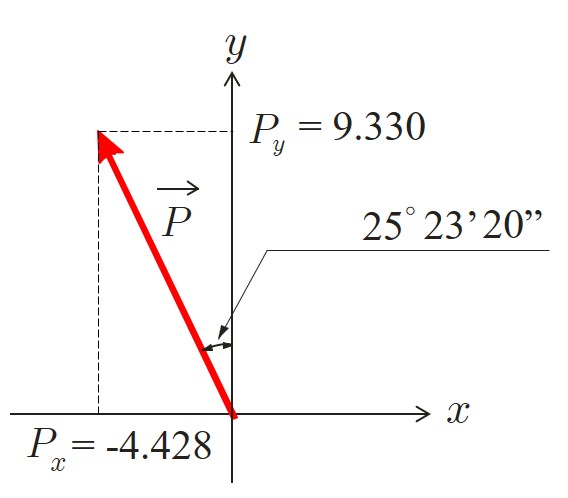
したがって,つり合う力 $\vec{P}$ の各方向の成分は
図1.2.7 に示すように,以下のようになる.
$\hspace{2em}$図1.2.7 つり合い力
\[
\left.
\begin{array}{rcr}
P_x &=& -4.428 \; {\rm N} \\
P_y &=& 9.330 \; {\rm N}
\end{array}
\right\}
\]
先の合力と比較してみると符号が逆転していることが理解できよう.以上より,つり合う力の大きさと方向は以下のようになる.
\[
\begin{array}{rcl}
P &=& \sqrt{P_x^2+P_y^2} = 10.327 \; {\rm N} \\
\theta &=& \tan^{-1} \displaystyle \frac{P_y}{P_x} = 25^{\circ} 23' 20"
\end{array}
\]
1.2.4 1点に会しない力のつり合い
$x-y$ 平面上にあって1点に会しない力,すなわち,すべての力の作用線がある1点に集まらないような力がつり合うためには以下の条件を満足しなければならない.
\[
\left.
\begin{array}{rcl}
\sum X &=& 0 \\
\sum Y &=& 0 \\
\sum ( X \times y - Y \times x) &=& 0
\end{array}
\right\}
\hspace{2em}
または
\hspace{2em}
\left\{
\begin{array}{rcll}
\sum H &=& 0 & (水平方向の力のつり合い)\\
\sum V &=& 0 & (鉛直方向の力のつり合い)\\
\sum M &=& 0 & (モーメントのつり合い)
\end{array}
\right.
\]
1番目と2番目の式は $x-y$ 平面にある1点に会する力が物体に作用したとき,その物体が並進運動を起こさない条件と同じであり,力の作用線がある1点で交わらない場合においても力がつり合うためには並進運動を起こしてははならない.
3番目の式は物体が
回転運動を起こさない条件 である.1点に会する力の場合は力の作用線から下した垂線の高さが0となるため自動的に3番目の式を満足していたことになるが,多くの力の作用線が1点で交わらない場合はそれぞれの力により力のモーメントが生ずる.それぞれの力により何の関係もなく生じた力のモーメントが物体を回転させないためには,それらのモーメントが打ち消し合わなければならない.それを示した式が3番目である.
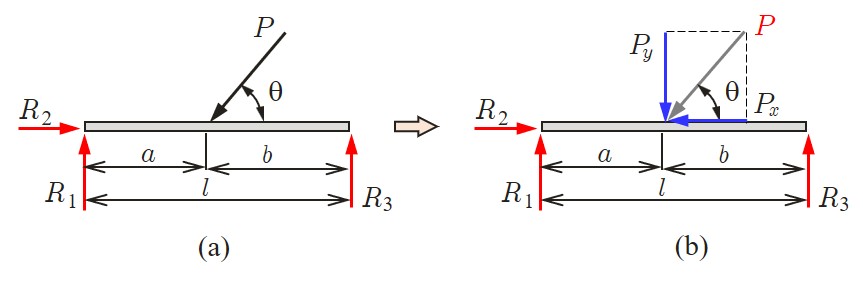
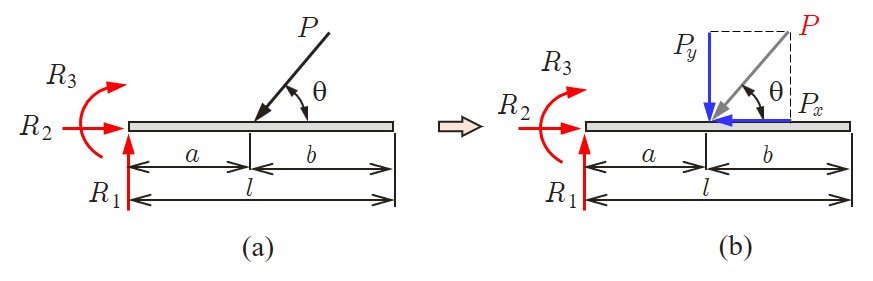
$\hspace{6em}$図1.2.8 1点に会しない力のつり合い
図1.2.8 に示すように,ある棒に4つの力が作用した状態を考えてみよう.
図(a) に示した4つの力の作用線が1点で交わらないことは明かである.もし,$P$ が既知であるなら,$R_1$,$R_2$,$R_3$ はどのような値となるであろうか求めてみよう.計算にあたり,荷重 $P$ が $x-y$ 軸に対し傾斜していると不便であるため
図(b) のように力 $P$ を $x$ および $y$ 方向に分解する.このとき,力 $P$ の$x$,$y$ 方向成分は以下のようになる.
\[
{\rm (1.2.3)}
\left.
\begin{array}{rcl}
P_x &=& P \cos \theta \\
P_y &=& P \sin \theta
\end{array}
\right\}
\]
この棒が並進運動を起こさないためには,以下の条件を満足しなければならない.
\[
{\rm (1.2.4)}
\left.
\begin{array}{rcll}
\sum H &=& 0 & \hspace{1em} R_2 - P_x = 0 \\
\sum V &=& 0 & \hspace{1em} R_1 + R_3 - P_y = 0
\end{array}
\right\}
\]
次に,この棒が回転しないためには,任意の点を基準として,その点に関する力のモーメントの和が0となればよい.計算上,この点を $R_1$ および $R_2$ が作用している点か,もしくは $R_3$ が作用している点にとれば未知数を減らすことができる.そこで,本計算では $R_1$ および $R_2$ が作用している点を基準にモーメントを計算する.
\[
{\rm (1.2.5)}
\sum M = 0 \hspace{1em} P_y \times a + P_x \times 0 - R_3 \times l = 0
\]
ここで,力のモーメントはその力の作用線から $R_1$ および $R_2$ が作用している点に下した垂線の高さであるから,2項目のように力が働いていながら垂線の高さが0であるためモーメントを生じないこともある.複雑な構造の場合における計算ミスはこのようなモーメントの計算で多く見られるので注意が必要である.
以上,
式(1.2.4) ,
式(1.2.5) を整理すると以下の関係が得られる.
\[
{\rm (1.2.6)}
\left.
\begin{array}{l}
R_2 = P_x \\
R_1 + R_3 = P_y \\
R_3 \times l = P_y \times a
\end{array}
\right\}
\]
これより,$R_1$,$R_2$,$R_3$ が以下のように求まる.
\[
{\rm (1.2.7)}
\left.
\begin{array}{l}
R_1 = \displaystyle \frac{b}{l}P_y = \frac{b}{l} P \sin \theta \\
R_3 = \displaystyle \frac{a}{l}P_y = \frac{a}{l} P \sin \theta \\
R_2 = P_x = P \cos \theta
\end{array}
\right\}
\]
例題1.2.1
図1.2.9 に示すように,棒に $P$,$R_1$,$R_2$,$R_3$ の4つの力が作用している.このとき,$P$ を既知として $R_1$,$R_2$,$R_3$ を求めてみよう.ただし,$R_3$ は回転させようとする力,すなわちモーメントである.
$\hspace{7em}$図1.2.9 モーメント荷重が作用する棒
図より,棒が並進運動を起こさない条件は以下のようになる.
\[
\left.
\begin{array}{rcll}
\sum H &=& 0 & \hspace{1em} R_2 - P_x = 0 \\
\sum V &=& 0 & \hspace{1em} R_1 - P_y = 0
\end{array}
\right\}
\]
一方,棒が回転運動を起こさない条件は,$R_1$,$R_2$,$R_3$ が作用している点を基準として,以下のようになる.
\[
\sum M = 0 \hspace{1em} R_3 + P_y \times a + P_x \times 0 = 0
\]
以上より,$R_1$,$R_2$,$R_3$ が以下のように求まる.
\[
\left.
\begin{array}{l}
R_1 = P_y = P \sin \theta \\
R_2 = P_x = P \cos \theta \\
R_3 = -P_y \times a = -P \sin \theta \times a
\end{array}
\right\}
\]
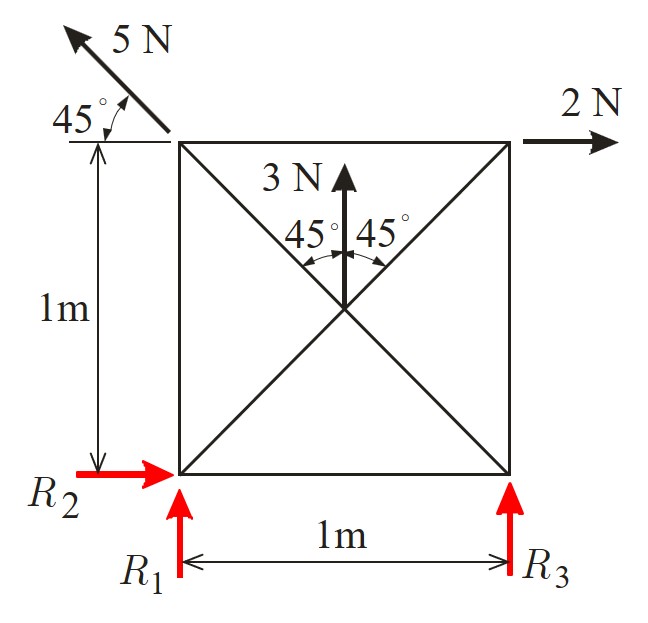
例題1.2.2
図1.2.10 に示すような少し複雑な構造の力のつり合いを考えてみよう.ここで,$R_1$,$R_2$,$R_3$ はこの構造がつり合い状態になるための未知の力である.
$\hspace{2em}$図1.2.10 複雑な構造
このとき,力のつり合い条件は以下のようになる.
\[
\left.
\begin{array}{rcll}
\sum H &=& 0 & \hspace{1em} R_2 + 2 - 5 \cos 45^{\circ} = 0 \\
\sum V &=& 0 & \hspace{1em} R_1 + R_3 + 3 + 5 \sin 45^{\circ}= 0 \\
\sum M &=& 0 & \hspace{1em}
R_3 \times 1 + 3 \times 0.5 - 2 \times 1 + 5 \cos 45^{\circ} \times 1 = 0
\end{array}
\right\}
\]
これを整理すると以下のようになる.
\[
\left\{
\begin{array}{l}
R_2 = 1.535 \\
R_1 + R_3 = - 6.535 \\
R_3 = -3.035
\end{array}
\right.
\]
以上より,$R_1$,$R_2$,$R_3$ が以下のように求まる.
\[
\left\{
\begin{array}{rcr}
R_1 &=& -3.500 \; {\rm N} \\
R_2 &=& 1.535 \; {\rm N} \\
R_3 &=& -3.035 \; {\rm N}
\end{array}
\right.
\]
1.3.1 位置・速度・加速度
物体がどのように運動するのかといった,物体の運動の様子を数学的に表現するのが
運動学 (kinematics)である.一方,運動と力の関係,すなわち,力によってどのような運動が生ずるかを論ずるのは
動力学 (dynamics)の範疇である.本章では動力学の基礎について記述するが,その準備として,この節では運動状態の表し方について考えてみる.
物体がどのように運動しているか,その状態を調べるためには,まず,時刻毎の物体の空間的な
位置 (position)を求める必要がある.また,その物体がどのくらいの速さで運動しているのか,加速しているのか減速しているのかなどを調べることも重要なことである.
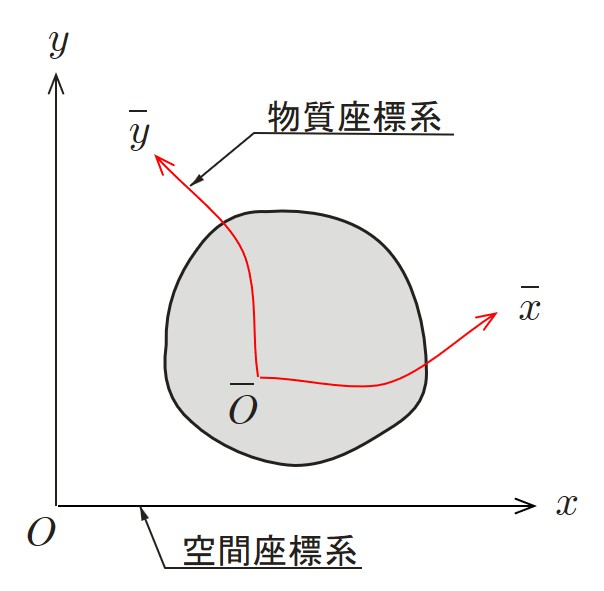
物体の位置を決定するためには基準となる座標系を設定し,その位置を座標値や位置ベクトルにより示せばよい.基準座標系をどのように考えるかは,例えば自動車や電車そのものの運動状態を示すなら空間に固定された座標系を,その中での運動状態なら運動している自動車や電車の内部に固定された座標系で考えた方が便利であろう.
図1.3.1 は空間に固定された
空間座標系 (spatial coordinate system)と物質に固定された
物質座標系 (material coordinate system)の2つの座標系が示してある.
$\hspace{4em}$図1.3.1 座標系
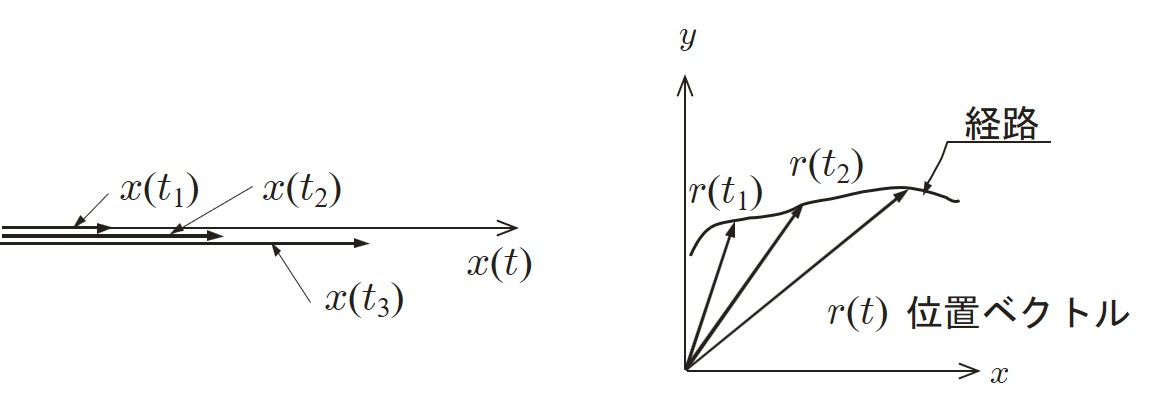
座標系が決まれば,その物体の時刻毎の位置ベクトル を示すことができる.時刻毎の位置ベクトルの先端をつらねた曲線を
経路 (path)あるいは
軌跡 (locus)と呼んでいる.経路は物体が運動した道筋のこである.
図1.3.2 は1次元と2次元の場合についてこれらの関係を示した図である.
$\hspace{4em}{\rm (a)}一次元 \hspace{10em}{\rm (b)}二次元$図1.3.2 経路
自動車でどこかに行こうと思ったとき,どのような経路で行こうかということも重要なことであるが,どのくらいの速さで行き,どれくらいの時間がかかるかということも重要である.このような速さを示す量として
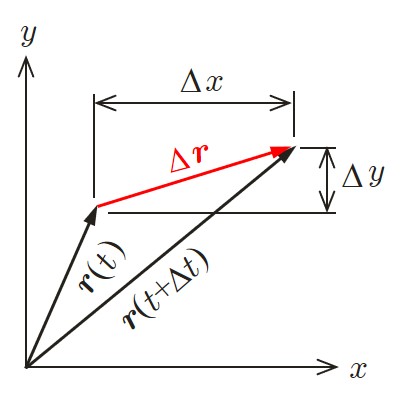
速度 (velocity)がある.速度は位置ベクトルの時間的な変化であり,すなわち,単位時間に位置がどれだけ変化したかを示している.時刻 $t$ における位置ベクトルを $\boldsymbol{r}(t)$ とし,$t + \Delta t$ 後の位置ベクトルを $\boldsymbol{r}(t+\Delta t)$ とすると
平均速度 (mean velocity) $\overline{\boldsymbol{v}}$ は
\[
{\rm (1.3.1)}
\overline{\boldsymbol{v}}
= \frac{\Delta \boldsymbol{r}}{\Delta t}
= \frac{\boldsymbol{r}(t + \Delta t) - \boldsymbol{r}(t)}{\Delta t}
\]
である.ここで,$\Delta \boldsymbol{r}$ は
図1.3.3 に示す関係にあり,その $x$ および $y$ 方向成分は,それぞれ,$\Delta x$,$\Delta y$ である.
$\hspace{0em}$図1.3.3 位置ベクトル
したがって,ある時刻における速度 $\boldsymbol{v}$ は以下のように表される.
\[
{\rm (1.3.2)}
\boldsymbol{v}
= \lim_{\Delta t \to 0} \frac{\Delta \boldsymbol{r}}{\Delta t}
= \frac{d \boldsymbol{r}}{d t}
= \dot{\boldsymbol{r}}
\]
これを2次元の場合について成分表示すると以下のようになる.
\[
{\rm (1.3.3)}
\left.
\begin{array}{rclcl}
v_x &=& \displaystyle \frac{dx}{dt} &=& \dot{x} \\
v_y &=& \displaystyle \frac{dy}{dt} &=& \dot{y}
\end{array}
\right\}
\]
位置ベクトルの先端の軌跡を経路と呼んだように,
図1.3.4 に示す速度ベクトルの先端の軌跡を
ホドグラフ (hodograph)と呼んでいる.
$\hspace{2em}$図1.3.4 ホドグラフ
位置ベクトルの場合と同様,速度の時間的変化率を考えてみよう.自動車の速度が速いといっても,ブレーキーを踏んで止まろうとしているのか,アクセルを踏んで加速しようとしているのかでは状況がまったく異なる.速度が速くなっていってるのか,遅くなっていっているのかを示す量を
加速度 (acceleration)と呼んでいる.すなわち,加速度は速度の時間的変化率を示している.位置ベクトルの時間的変化率から速度を求めたように,速度から加速度を求める場合は以下のようになる.
\[
{\rm (1.3.4)}
\boldsymbol{\alpha}
= \lim_{\Delta t \to 0} \frac{\Delta \boldsymbol{v}}{\Delta t}
= \frac{\boldsymbol{v}(t + \Delta t) - \boldsymbol{v}(t)}{\Delta t}
= \frac{d \boldsymbol{v}}{d t}
= \dot{\boldsymbol{v}}
\]
一方,速度は位置の関数であるから,加速度と位置とは以下の関係がある.
\[
{\rm (1.3.5)}
\boldsymbol{\alpha} = \dot{\boldsymbol{v}} = \ddot{\boldsymbol{r}}
\]
加速度もベクトルであるため,以下のように成分表示をすることができる.
\[
{\rm (1.3.6)}
\left.
\begin{array}{rclcl}
\alpha_x &=& \dot{v}_x &=& \ddot{x} \\
\alpha_y &=& \dot{v}_y &=& \ddot{y}
\end{array}
\right\}
\]
1.3.2 放物運動
ガリレイは地球上で空気抵抗を無視した場合,自由落下する物体は一定の加速度を受けるという落下の法則を示した.この加速度のことを
重力加速度 (acceleration of gravity) といい,その値は以下に示すとおりである.
\[
{\rm (1.3.7)}
g = 9.80 \; {\rm m/sec^2}
\]
いま,
図1.3.5 に示すようにx軸を下方向にとり,初速 $v_0$ で物体を落下させた状態を考えてみよう.このとき物体の運動は
等加速度運動 (uniformly accelerated motion)となるから,ある時刻 $t$ での速度と位置は,
$\hspace{0em}$図1.3.5 自由落下
\[
{\rm (1.3.8)}
\left.
\begin{array}{rcl}
v &=& gt + v_0 \\
x &=& \displaystyle \frac{1}{2} gt^2 + v_o t + x_0
\end{array}
\right\}
\]
となる.ここで,$x_0$ は $t=0$ での物体の位置を示している.
この式を利用すれば,初速 $v_0 = 0$ で高さ $h$ から物体を落下させたときの到達時間 $t$ と速度 $v$ は以下のように求めることができる.
\[
{\rm (1.3.9)}
\left.
\begin{array}{rcl}
t &=& \displaystyle \sqrt{\frac{2h}{g}} \\
v &=& \sqrt{2gh}
\end{array}
\right\}
\]
逆に下から初速度v0で真上に投げ上げた場合は,
式(1.3.8) において,$v_0$ を $-v_0$ として,最高点へ達する時間 $t$ と高さ $h$ が以下のよう求まる.ただし,上側に測った高さである.
\[
{\rm (1.3.10)}
\left.
\begin{array}{rcl}
t &=& \displaystyle \frac{v_0}{g} \\
h &=& \displaystyle \frac{v_0^2}{2g}
\end{array}
\right\}
\]
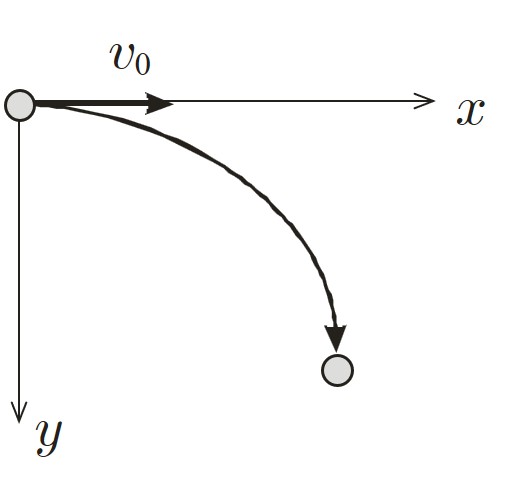
$\hspace{0em}$図1.3.6 放物運動
次に,ある高さから物体を水平に投げたときの経路について考えてみよう.物体は単に水平運動を起こすばかりでなく,同時に落下運動も発生する.いま,基準座標軸を
図1.3.6 のようにとると,$x$ 方向および $y$ 方向の加速度は以下のようになる.
\[
{\rm (1.3.11)}
\left.
\begin{array}{rcl}
\alpha_x &=& 0 \\
\alpha_y &=& g
\end{array}
\right\}
\]
また,水平方向の初速を $v_0$,下方向の初速を0とするならば,この物体の速度と位置は,それぞれ,以下のようになる.
\[
{\rm (1.3.12)}
\left.
\begin{array}{rcl}
v_x &=& v_0 \\
v_y &=& gt
\end{array}
\right\}
\]
\[
{\rm (1.3.13)}
\left.
\begin{array}{rcl}
x &=& v_0 t \\
y &=& \displaystyle \frac{1}{2}gt^2
\end{array}
\right\}
\]
式(1.3.13) において,時間 $t$ を消去すると
\[
{\rm (1.3.14)}
y = \frac{g}{2v_o^2} x^2
\]
となり,物体の軌跡は放物線を描くことが理解できる.このような運動を
放物運動 と呼ぶ.
1.3.3 円運動 図1.3.7 に示すような角 $\theta$ の時間的な変化について考えてみよう.いま,角の単位としてラジアンを用いれば時間的な平均変化率は以下のようになる.
$\hspace{0em}$図1.3.7 角度の変化
\[
{\rm (1.3.15)}
\overline{\omega}
= \frac{(\theta + \Delta \theta) - \theta}{\Delta t}
= \frac{\Delta \theta}{\Delta t}
\]
したがって,角の時間的変化率は
\[
{\rm (1.3.16)}
\omega
= \lim_{\Delta t \to 0} \frac{\Delta \theta}{\Delta t}
= \frac{d \theta}{d t}
\]
となる.これを,
角速度 (angular velocity)という.角速度の単位は(rad/sec)である.回転機械などでは1分間当たりの回転数(r.p.m) を誘導することがよくあるが,この単位と角速度との間には次の関係が成立する.
\[
{\rm (1.3.17)}
1 \; {\rm r.p.m} = \frac{ 2 \pi}{60} = 0.1047 \; {\rm rad/sec}
\]
また,角速度の時間的変化率は
\[
{\rm (1.3.18)}
\frac{d \omega}{dt} = \frac{d^2 \theta}{dt^2}
\]
と表わすことができ,これを
角加速度 (angular acceleration)という.
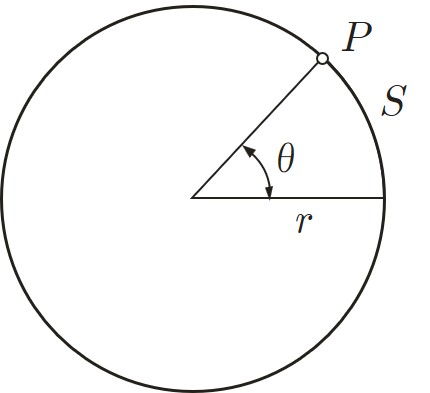
図1.3.8 において,$\boldsymbol{r}$ が一定であれば,点 $P$ の軌跡は円となる.この運動を
円運動 (circular motion)と呼んでいる.もし,点 $P$ の速度が一定であるなら,このような運動のことを,
等速円運動 (uniform circular motion)という.このとき,点 $P$ の速度は
$\hspace{1em}$図1.3.8 円運動
\[
{\rm (1.3.19)}
v = \frac{d s}{d t} = r \frac{d \theta}{d t} = r \omega
\hspace{2em}( \because \; S = r \theta)
\]
であり,円の接線方向を向く.一方,加速度は常に半径方向を向き,その大きさは次のように表される.
\[
{\rm (1.3.20)}
\alpha = \frac{v^2}{r} = r \omega^2
\]
この加速度をその意味から
求心加速度 あるいは
向心加速度 という.
1.3.4 単振動
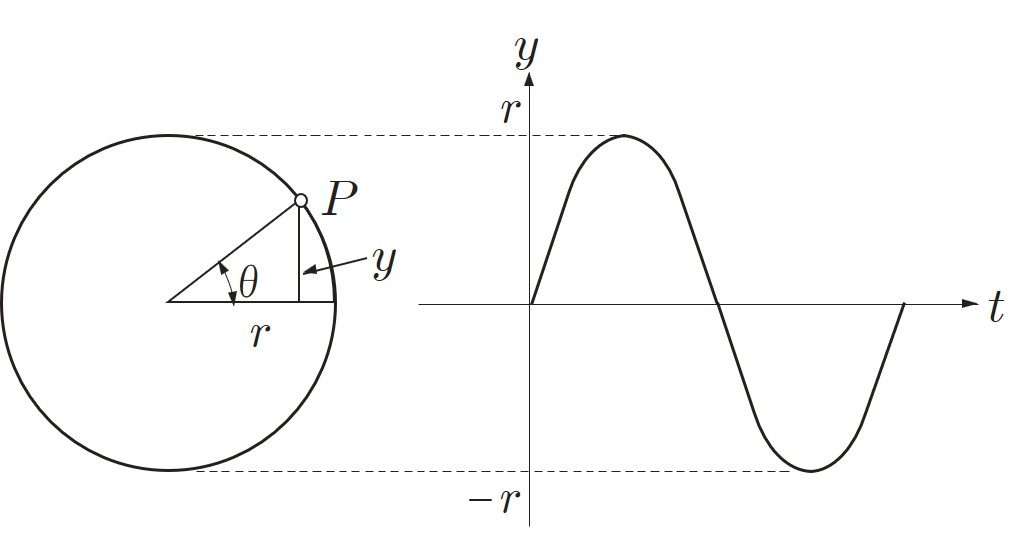
等速円運動をする点 $P$ の $y$ 座標の変化について考えてみよう.
図1.3.9 は座標軸として縦軸に $y$,横軸に時間 $t$ をとった図である.$P$ 点の $y$ 座標は
$\hspace{6em}$図1.3.9 角度の変化
\[
{\rm (1.3.21)}
y = r \sin \theta
\]
で与えられるが,等速円運動の場合,ある時刻 $t$ の角 $\theta$ は角速度 $\omega$ より
\[
{\rm (1.3.22)}
\theta = \omega \cdot t
\]
と計算することができるため,
式(1.3.21) は次のように表される.
\[
{\rm (1.3.23)}
y = r \sin ( \omega t)
\]
ここで,$r$ のことを
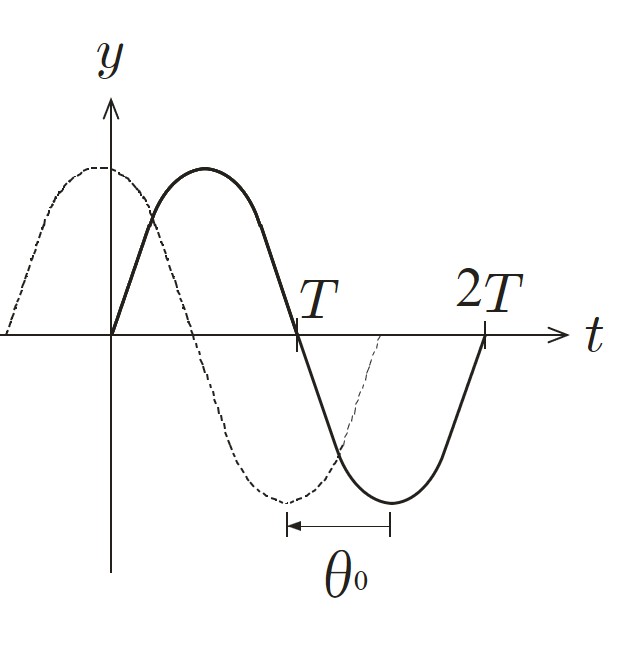
振幅 (amplitude) と呼ぶ.この式は $t=0$ で $P$ が $y=0$ 上にある場合であるが,もし,$\theta=\theta_0$ の位置にあった場合は以下のようになる.
\[
{\rm (1.3.24)}
\theta = \omega t + theta_0
\]
この $\theta_0$ を
位相 (phase)という.このとき,
式(1.3.23) は
\[
{\rm (1.3.25)}
y = r \sin ( \omega t + \theta_0)
\]
となり,そのグラフは
図1.3.10 のように,$\theta_0$ だけもとの図とずれた図になる.
$\hspace{2em}$図1.3.10 位相
式(1.3.25) で表される運動のことを
単純調和運動 (simple harmonic motion)あるいは
単振動 と呼んでいる.この運動は $\sin$ 関数により表されるため,周期性を持っており,その
周期 (period)は以下のとおりである.
\[
{\rm (1.3.26)}
T = \frac{2 \pi}{\omega}
\]
また,以下に示す周期の逆数のことを
振動数 (frequency)(
周波数 )と呼ぶ.
\[
{\rm (1.3.27)}
n = \frac{1}{T} = \frac{\omega}{2 \pi}
\]
1.4.1 運動の法則
ガリレイは,「
運動している物体は力の作用を受けなければその運動状態を保ちつづける 」といった,
慣性の法則 を発見した.ニュートンはこの法則を彼の運動に関する三つの法則の第1番目とし,「
力の作用を受けない質点は等速運動を行う 」といった,
ニュートンの第1法則 を示した.このことを逆説的に考えれば,力が働けば運動状態が変化するということであり,これを示した法則が「
質点に力が働くと加速度が生じ,その加速度は力に比例する 」という
ニュートンの第2法則 である.単に
運動の法則 (law of motion)という場合にはこの法則のことをいう.ニュートンの運動の第2法則を式で表すと以下のように書くことができる.
\[
{\rm (1.4.1)}
\boldsymbol{F} = m \boldsymbol{\alpha}
\]
ここで,$\boldsymbol{F}$ は質点に働く力,$m$ は質量,$\boldsymbol{\alpha}$ は加速度である.質量は慣性の大きさを表す量であり,そのことを特に強調したい場合は
慣性質量 (inertial mass)という.
1.4.2 運動の方程式
ニュートンの運動の第2法則は速度や位置ベクトルを用いても表すことができる.
\[
{\rm (1.4.2)}
\boldsymbol{F} = m \boldsymbol{\alpha}
= m \frac{d \boldsymbol{v}}{dt}
= m \frac{d^2 \boldsymbol{r}}{dt^2}
= m \dot{\boldsymbol{v}}
= m \ddot{\boldsymbol{r}}
\]
この式を
運動の方程式 (equation of motion)と呼んでいる.運動の方程式を成分表示すると2次元の場合,以下のようになる.
\[
{\rm (1.4.3)}
\left.
\begin{array}{l}
F_x = m \alpha_x = \displaystyle m \frac{d v_x}{dt}
= \displaystyle m \frac{d^2 x}{dt^2}
= m \dot{v_x}
= m \ddot{x} \\
F_y = m \alpha_y = \displaystyle m \frac{d v_y}{dt}
= \displaystyle m \frac{d^2 y}{dt^2}
= m \dot{v_y}
= m \ddot{y}
\end{array}
\right\}
\]
さて,ここで物体の重量について考えてみよう.地球上では非常に重いものであっても無重力状態では重量を感じない.これは地球上において物体が重力加速度 $g$ を受けているためである.物体の質量がmであるなら重量Wは以下のように表すことができる.
\[
{\rm (1.4.4)}
W = m \cdot g
\]
静力学だけを対象としている場合,質量と重量の扱いが曖昧であったが,運動する物体の力学を扱う場合には質量と重量を明確に区別しておく必要ががある.SI単位系を利用する場合はこのことが厳密に区別されているため混乱は少ないが,従来単位系を利用する場合には力の単位をキログラム重などのように質量単位と区別した方がよい.
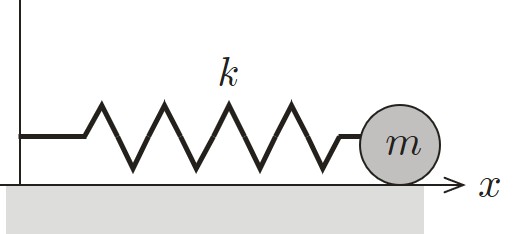
$\hspace{2em}$図1.4.1 ばね・質量
いま,
図1.4.1 に示すような質量 $m$ の物体がばねにつながれ,机の上に水平に置かれた状態を考えてみよう.ただし,物体と机との摩擦は無視する.さて,物体を $x$ だけ引っ張るとばねには
\[
{\rm (1.4.5)}
F = -kx
\]
なる引き戻そうとする負の力が生じる.一方,運動の法則より物体は以下の運動を起こす.
\[
{\rm (1.4.6)}
F = m \alpha = m \frac{d^2 x}{dt^2}
\]
以いま上の両者の関係から,以下の運動方程式を得ることができる.
\[
{\rm (1.4.7)}
m \frac{d^2 x}{dt^2} = -kx
\]
この方程式は $x$ と $t$ に関する微分方程式になっており,これを解くことによって運動状態を知ることができる.この例の場合,
\[
{\rm (1.4.8)}
x = A \sin ( \omega t + \theta_0) \hspace{2em}
\left(
\because \omega = \sqrt{ \frac{k}{m} }
\right)
\]
であり,単振動の式になる.振幅 $A$ や位相 $\theta_0$ は初期条件によって決まる.一般的にはばねのように $F = -kx$ の力が作用する場合に単振動を起こす.
1.4.3 慣性力
自動車や電車に乗っているとき,それらが急に加速すると後ろへ戻されそうに感じる.これは,乗っている人に後ろ向きの加速度が作用するため,その人の質量を $m$,自動車や電車の加速度を$\alpha$ とするとき,以下の式で表される見かけの力が作用するためである.
\[
{\rm (1.4.9)}
F = - m \alpha
\]
このような見かけの力を
慣性力 (inertial force)という.
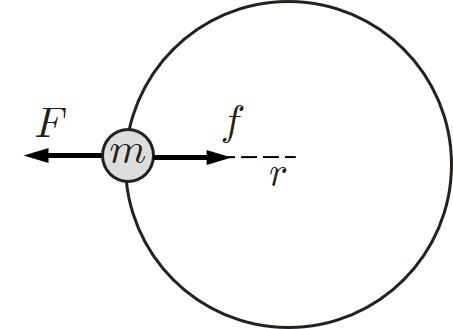
$\hspace{1em}$図1.4.2 円心力と向心力
一方,
図1.4.2 に示すよう,質量 $m$ のおもりにひもを付けて回転させてみよう.運動は等速円運動とする.このとき,ひもを持って円の中心で回転している人から見ると,物体は円の中心に向かう向心加速度が作用するため,以下の
向心力 (centripetal force)がひもに作用する.
\[
{\rm (1.4.10)}
f = m \alpha = m \frac{v^2}{r} = m r \omega^2
\]
ところが,物体に乗っている人から見れば,その人は外へ投げ出されるような力を感じる.自動車に乗ってカーブを曲がるときもそのような力を感ずることがよくある.物体に乗っている人から見れば物体は静止しており,外向きの力Fが作用していることになる.このような力を
遠心力 (centrifugal force) といい,向心力とつり合い状態にあることから以下の関係が成立する.
\[
{\rm (1.4.11)}
F = -f = -m \alpha = -m \frac{v^2}{r} = -m r \omega^2
\]
この他,慣性力の一種として
コリオリの力 などがある.
1.4.4 摩擦力
物体の接触面において
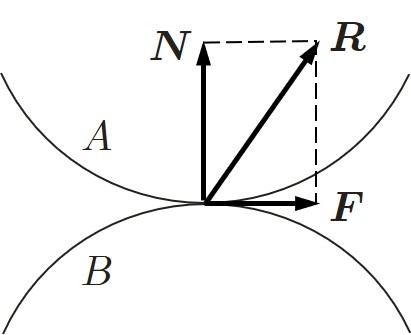
摩擦 (friction)があった場合について考えてみよう.
図1.4.3 に示すように,2つの物体 $A$,$B$ が1点で接触しているとする.もし,接触面において摩擦があれば,接触面上の合力 $\boldsymbol{R}$ は図のように垂直反力 $\boldsymbol{N}$ と一致しない.これは,接触面上に
摩擦力 (friction force) $\boldsymbol{F}$ が発生するためである.
$\hspace{2em}$図1.4.3 摩擦力
物体が静止している場合,垂直反力 $\boldsymbol{N}$ と外力の作用によって物体がまさに動こうとする直前の摩擦力 $\boldsymbol{F}_0$(
最大静止摩擦力 )の比を
静止摩擦係数 (coefficient of static friction)といい,以下の式で表される.
\[
{\rm (1.4.12)}
\mu = \frac{\boldsymbol{F}_0}{\boldsymbol{N}}
\]
また,次式で表される角度を
摩擦角 (angle of friction)と呼んでいる.
\[
{\rm (1.4.13)}
\lambda = \tan^{-1} \mu
\]
一般に,摩擦力と最大静止摩擦力との間には以下の関係が成立する.
\[
{\rm (1.4.14)}
\boldsymbol{F} \le \boldsymbol{F}_0
\hspace{1em}, \hspace{1em}
\frac{\boldsymbol{F}}{\boldsymbol{N}} \le \mu
\]
一方,運動している物体の摩擦力 $\boldsymbol{F}$ と垂直力 $\boldsymbol{N}$ との間には以下の関係が成立する.
\[
{\rm (1.4.15)}
\mu' = \frac{\boldsymbol{F}}{\boldsymbol{N}}
\]
この $\mu'$ を
動摩擦係数 (coefficient of kinetic friction)と呼んでいる.また,以下の式で表される $\lambda$ を
動摩擦角 (angle of kinetic friction)という.
\[
{\rm (1.4.16)}
\lambda = \tan^{-1} \mu'
\]
動摩擦力は静止摩擦力より小さく,以下の関係が成立する.
\[
{\rm (1.4.17)}
\mu' \le \mu
\]
例題1.4.1
図1.4.4 に示すような斜面に質量 $m$ の物体を置き,初速度 $v_0$ ですべらせたところ,物体が距離 $l$ で停止した.このときの摩擦係数を求めてみよう.
$\hspace{6em}$図1.4.4 斜面上の置かれた物体
いま,摩擦力は $\mu mg \cos \theta$ であるから,運動の方程式は以下のようになる.
\[
{\rm (1.4.18)}
m \frac{d^2 x}{dt^2} = mg \sin \theta - \mu mg \cos \theta
\]
これを積分し,$t=0$ で $v=v_0$ という初期条件を用いれば $t$ 時間後の速度が以下のように求まる.
\[
{\rm (1.4.19)}
v = g(\sin \theta - \mu \cos \theta)t + v_0
\]
この速度が0となる時間は以下のように計算される.
\[
{\rm (1.4.20)}
t_0 = \frac{v_0}{g( \mu \cos \theta - \sin \theta)}
\]
一方,
式(1.4.19) を積分し,$t=0$ で $x=0$ という条件より $t$ 時間後の位置を求めると次のようになる.
\[
{\rm (1.4.21)}
x = \frac{g}{2} (\sin \theta - \mu \cos \theta)t^2 + v_0 t
\]
物体が停止した位置は $x=l$ であり,またその時間は $t=t_0$ であるため,
式(1.4.20) ,
式(1.4.21) より物体の停止位置が以下のように求まる.
\[
{\rm (1.4.22)}
l = \frac{v_0^2}{2g( \mu \cos \theta - \sin \theta)}
\]
したがって,摩擦係数は以下のようになる.
\[
{\rm (1.4.23)}
\mu = \tan \theta + \frac{v_0^2}{2g \cos \theta}
\]
1.4.5 運動を妨げる力
摩擦力は運動を妨げる力の一つであるが,この他にも運動を妨げる力がある.例えば,空中を落下する物体の運動における空気抵抗がある.空気抵抗を落下する速度に比例するとした場合,運動方程式は以下のように表される.
\[
{\rm (1.4.24)}
m \frac{dv}{dt} = mg - \lambda v
\]
ここで,$\lambda$ は抵抗係数である.この方程式を $(k=\lambda/m)$ として書き換えると以下のようになる.
\[
{\rm (1.4.25)}
\frac{-k \cdot dv}{g-kv} = -k \cdot dt
\]
この式を積分することにより速度と時間の関係が以下のように求まる.
\[
{\rm (1.4.26)}
v = \frac{1}{k} \left( -Ce^{-kt} +g \right)
\]
落下速度が一定速度 $v_r$ となるのは $g=k \cdot v_r$ で,無限時間後である.また,落下距離は
式(1.4.26) を積分することにより以下のようになる.
\[
{\rm (1.4.27)}
s = \frac{1}{k} \left( gt + \frac{C}{k}e^{-kt} + D \right)
\]
もし,$t=0$ で $v=0$,$s=0$ であれば,
式(4.1.26) ,
式(4.1.27) は以下のようになる.
\[
{\rm (1.4.28)}
v = \frac{g}{k} \left( 1 - e^{-kt} \right)
\]
\[
{\rm (1.4.29)}
s = \frac{g}{k}t - \frac{g}{k^2} \left( 1 - e^{-kt} \right)
\]
運動を妨げる力としてはこの他にも流体などの粘性によって生ずる力や船体に作用する水の抵抗など工学的に重要なものが数多くある.しかし,多くの問題はここで示した例題のような簡単な積分で求めることができないため,数値計算を含めいろいろな近似計算を行っているのが現状である.
1.5.1 運動量と力積
運動している物体の運動の量を示す場合,速度だけでは不十分である.野球のボールとと砲丸投げの球が同じスピードで飛んできた状態を考えてみると,明らかに砲丸投げの球の方が破壊力が大きい.このように,運動の状態を示す量は質量と密接な関係があり,慣性質量 $m$ と速度 $\boldsymbol{v}$ の積により以下のように表す方が便利である.
\[
{\rm (1.5.1)}
\boldsymbol{p} = m \boldsymbol{v}
\]
この量のことを
運動量 (momentum)という.運動量 $\boldsymbol{p}$ を利用すると先の運動の方程式は以下のように表すことができる.
\[
{\rm (1.5.2)}
\boldsymbol{F} = m \boldsymbol{\alpha}
= m \dot{\boldsymbol{v}}
= \dot{\boldsymbol{p}}
\]
この形の運動の方程式は特殊相対性理論の力学においても成立している.力 $\boldsymbol{F}$ が $\Delta t$ 時間作用したとき,それらの積 $\boldsymbol{F} \cdot \Delta t$ を
力積 (impulse)という.
式(1.5.2) に $\Delta t$ を掛けると左辺は力積であり,右辺は次のようになる.
\[
{\rm (1.5.3)}
\dot{\boldsymbol{p}} \cdot \Delta t
= \frac{d \boldsymbol{p}}{dt}
= \boldsymbol{p} (t + \Delta t ) - \boldsymbol{p} (t)
= \Delta {\boldsymbol{p}}
\]
式(1.5.3) において,$\Delta {\boldsymbol{p}}$ は $\Delta t$ 秒間における運動量の変化であり,したがって,力積は以下のように書くことができる.
\[
{\rm (1.5.4)}
\boldsymbol{F} \cdot \Delta t
= \Delta \boldsymbol{p}
= m \cdot \Delta \boldsymbol{v}
\]
この関係は運動の法則を運動量と力積で表したものであり,
運動量の原理 ともいう.すなわち,質点に力が働くとき,その力積だけ運動量が増加することになる.
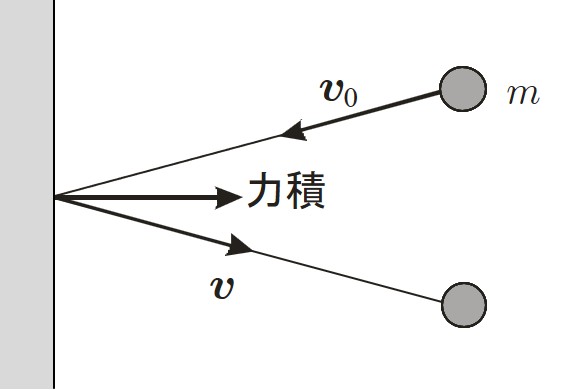
$\hspace{3em}$図1.5.1 力積
図1.5.1 に示すように,質量 $m$ のボールが速度 $\boldsymbol{v}_0$ で壁にぶつかった後,速度 $\boldsymbol{v}$ で跳ね返ったとしよう.もし,ボールが壁にぶつかっていた時間を $\Delta t$ とするとボールに働いた平均の力は運動量の原理から以下のように求めることができる.
\[
{\rm (1.5.5)}
F = \frac{m | \boldsymbol{v} - \boldsymbol{v}_0|}{\Delta t}
\]
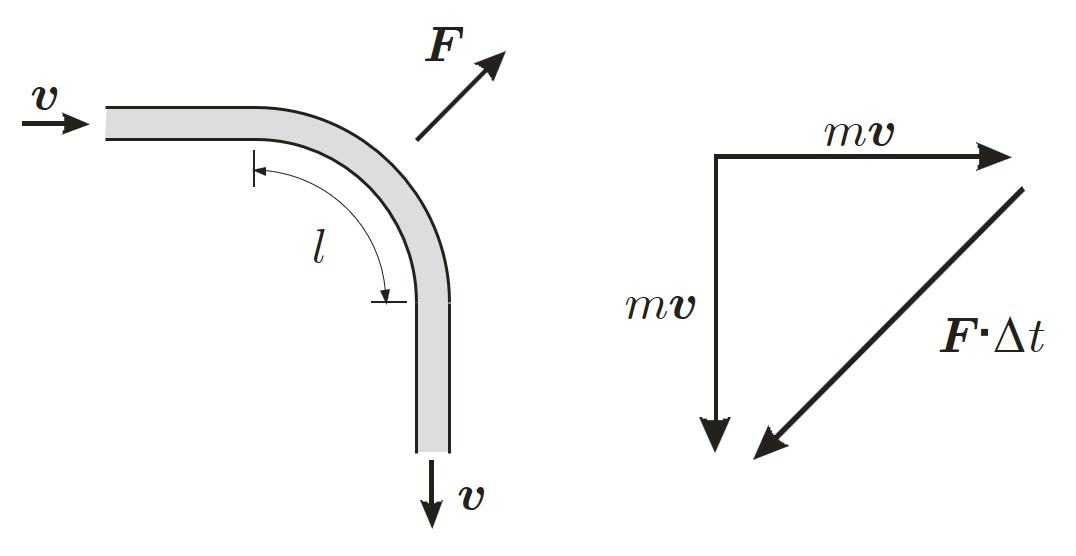
$\hspace{4em}$図1.5.2 パイプの受ける力
次に,
図1.5.2 に示すような曲がったパイプのコーナーが受ける力について考えてみよう.パイプの断面積を $S$ とし,$\boldsymbol{v}$ の速度で密度 $\rho$ の流体が流れ込み,速度 $\boldsymbol{v}$ で流出した場合,曲がり部の流体の質量 $m$ を
\[
{\rm (1.5.6)}
m = \rho S l
\]
として,運動量の変化 $\Delta \boldsymbol{p}$ の大きさが以下のように求まる.
\[
{\rm (1.5.7)}
\Delta p = |\Delta \boldsymbol{p}|
= |\boldsymbol{p} - \boldsymbol{p}_0|
= \sqrt{2} mv
\]
また,流体が曲がり部分を通過する時間だけ力が働くから,$\Delta t = l/v$ より,
\[
{\rm (1.5.8)}
F = \frac{\Delta p}{\Delta t}
= \frac{\sqrt{2} \rho S l v}{\displaystyle \frac{l}{v}}
= \sqrt{2} \rho S v^2
\]
なる力か働くことになる.このように管の受ける力は流速の2乗に比例する.
この例のように質点系における運動量の関係は,その極限として連続体に関しても考えることができる.流体力学ではエネルギー損失を考慮し,このような運動量の方程式がよく利用されている.水理学を学習するための準備として,ここで再度運動量の方程式について整理しておこう.
$\hspace{3em}$図1.5.3 流量
図1.5.3 のような流管の一部 $AabB$ を取り出して考えてみよう.いま,$Aa$ 断面を単位時間に通過する質量は $Aa$ 断面の断面積を $AA$ として以下のようになる.
\[
{\rm (1.5.9)}
\rho \cdot v_A \cdot A_A = \rho Q
\]
ここで,$Q$ は
流量 (discharge) と呼ばれる量で,
\[
{\rm (1.5.10)}
Q = v_A \cdot A_A
\]
であり,$\rho \cdot Q$ は
質量輸送速度 と呼ばれている.したがって,この断面における運動量は,$\rho \cdot Q \cdot v_A$ となる.$Bb$ 断面においても同様な関係が成立することから,$AabB$ に包まれた流体部分に関する運動量は $\rho \cdot Q (\boldsymbol{v}_B-\boldsymbol{v}_A)$ で与えられる.
一方,単位時間に働く外力を $\boldsymbol{F}$ とすれば運動量の方程式が以下のように得られる.
\[
{\rm (1.5.11)}
\boldsymbol{F} = \rho \cdot Q (\boldsymbol{v}_B-\boldsymbol{v}_A)
\]
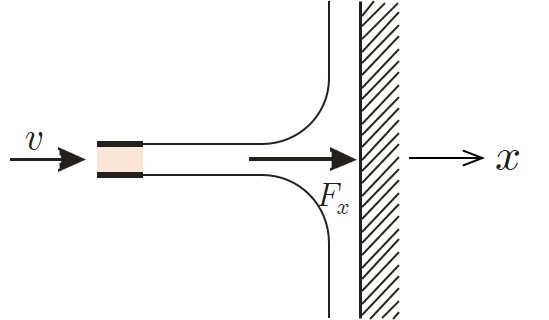
例題1.5.1
図1.5.4 のように直径 $8 \; {\rm cm}$ の噴流が $v=45 \; {\rm m/sec}$ の速度で板に垂直に衝突し,$90^{\circ}$ に曲げられたとき,板に働く力を求めてみよう.
$\hspace{4em}$図1.5.4 噴流
この問題の場合,水の単位体積重量を $w$ として質量輸送速度が
\[
\rho \cdot Q = \frac{w}{g} A \cdot v
\]
であることより,
式(1.5.11) から板に働く力が以下のように求まる.
\[
F_x = \rho Q v
= \frac{w}{g} A \cdot v^2
= \frac{1}{9.8} \times \frac{\pi}{4} \times (0.008)^2 \times 45^2
= 1.04 \; {\rm N}
\]
1.5.2 運動量保存の法則
いくつかの物体が互いに力をおよぼし合い運動するとき,それぞれの運動量は変化するものの,外力の作用を受けなければ全体の運動量は保存される.これを
運動量保存の法則という.
\[
{\rm (1.5.12)}
\boldsymbol{f}_{12} = -\boldsymbol{f}_{21}
\]
もし,$m_1$ と $m_2$ に外力 $\boldsymbol{F}_1$ と $\boldsymbol{F}_2$ が働いているなら,それぞれの運動量を $\boldsymbol{p}_1$,$\boldsymbol{p}_2$ として,以下のような運動の方程式が得られる.
\[
{\rm (1.5.13)}
\left.
\begin{array}{rcl}
\displaystyle \frac{d\boldsymbol{p}_1}{dt}&=&\boldsymbol{f}_{12}+\boldsymbol{F}_1 \\
\displaystyle \frac{d\boldsymbol{p}_2}{dt}&=&\boldsymbol{f}_{21}+\boldsymbol{F}_2
\end{array}
\right\}
\]
ここで,両者の運動方程式を加え合わせると式(1.5.12) より以下のようになる.
\[
{\rm (1.5.14)}
\frac{d}{dt}( \boldsymbol{p}_1+ \boldsymbol{p}_2)
=
\boldsymbol{F}_1 + \boldsymbol{F}_2
\]
それぞれの運動量 $\boldsymbol{p}_1$,$\boldsymbol{p}_2$ の和を全体の運動量 $\boldsymbol{p}$ として
\[
{\rm (1.5.15)}
\boldsymbol{p} = \boldsymbol{p}_1 + \boldsymbol{p}_2
\]
と表すと式(1.5.14) は以下のように表すことができる.
\[
{\rm (1.5.16)}
\frac{d \boldsymbol{p}}{dt} = \boldsymbol{F}_1 + \boldsymbol{F}_2
\]
外力 $\boldsymbol{F}_1$ と $\boldsymbol{F}_2$ が0であるなら,すなわち,外力が作用していなければ式(1.5.16) は
\[
{\rm (1.5.17)}
\frac{d \boldsymbol{p}}{dt} = 0
\]
となり,全体の運動量が一定であることがわかる.
1.5.3 衝突 図1.5.5 に示すよう質量が $m_1$ と $m_2$ の2つの物体の運動について考えてみよう.
$\hspace{4em}$図1.5.5 衝突
衝突前質量 $m_1$ の物体は $v_1$ で運動しており,質量 $m_2$ の物体は $v_2$ で運動していたとする.衝突後,両者の速度は $v'_1$ と $v'_2$ に変化すると運動量保存則より以下の関係が成立する.
\[
{\rm (1.5.18)}
m_1 v_1 + m_2 v_2 = m_1 v'_1 + m_2 v'_2
\]
運動量を簡単に $p$ で表せば,式(1.5.18) は次のようになる.
\[
{\rm (1.5.19)}
p_1 + p_2 = p'_1 + p'_2
\]
もし,2つの物体の質量と衝突前の両者の速度ならびに衝突後の一方の速度がわかれば,もう一方の速度は式(1.5.18) で示した運動量保存の法則より求めることができる.しかし,衝突後の両者の速度がわかなければ全体の運動量しか知ることができない.かりに,衝突時に働く力の関係がわかれば,個々の運動方程式から速度を求めることができるが,実際にはそのような力は複雑で簡単に示すことはできない.はねかえり係数 (coefficient of rebound)が用いられる.このはねかえり係数は衝突前の相対的な速度と衝突後の相対的な速度の比により以下のように表される.
\[
{\rm (1.5.20)}
e = \frac{|v'_1 - v'_2|}{|v_1-v_2|}
\]
これによって,衝突後の力を代表させれば先の問題は解決する.
\[
\begin{array}{rl}
e = 1 & 弾性衝突 \\
e \gt 1 & 爆発などが生じエネルギーが補給される場合 \\
0 \lt e \lt 1 & 非弾性衝突 \\
e = 0 & 完全非弾性衝突
\end{array}
\]
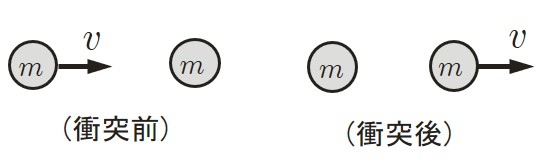
弾性衝突は衝突によって,後で説明する運動エネルギーが変化しない状態であり,図1.5.6 に示す例はその代表的なものである.
$\hspace{5em}$図1.5.6 弾性衝突
これは,同じ質量の球が一方は $v$ で運動し他方は静止しているとすると,衝突後,$v$ で運動していた物体が静止し,静止していた物体が $v$ で運動し出す状態である.また,完全非弾性衝突 は運動が完全に停止する現象である.式(1.5.18) の運動量保存の法則と式(1.5.20) のはねかえり係数の式より
\[
{\rm (1.5.21)}
\left.
\begin{array}{lcr}
v'_1 &=& \displaystyle \frac{1}{m_1+m_2}
\left\{ p - em_2(v_1-v_2) \right\} \\
v'_2 &=& \displaystyle \frac{1}{m_1+m_2}
\left\{ p - em_1(v_1-v_2) \right\}
\end{array}
\right\}
\]
\[
\hspace{10em} \left( p = m_1 v_1 + m_2 v_2\right)
\]
のように衝突後の速度を求めることができる.
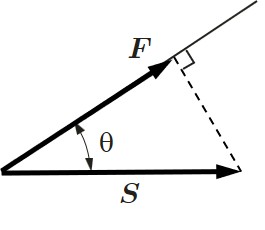
1.6.1 仕事と仕事率 仕事 (work)という.
$\hspace{1em}$図1.6.1 力と距離
仕事は図1.6.1 に示すように,力 $\boldsymbol{F}$ の作用のもと,$\boldsymbol{S}$だけ移動したとすると
\[
{\rm (1.6.1)}
W = \boldsymbol{F} \cdot \boldsymbol{S} = FS \cos \theta
\]
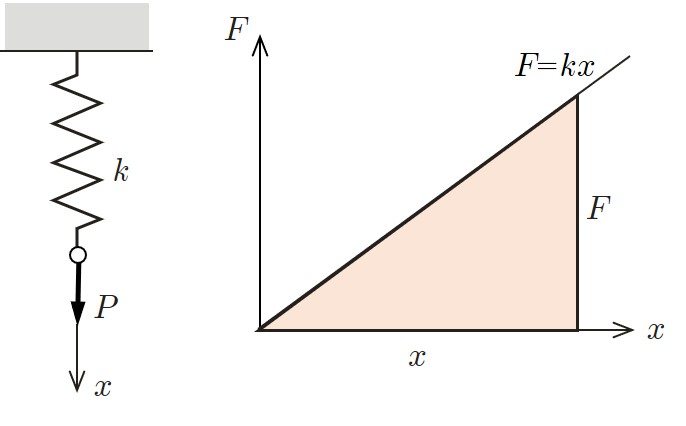
となる.いま,縦軸に力の大きさを,横軸に力の方向の移動量をとりグラフを作成すると図1.6.2 のようになる.
$\hspace{3em}$図1.6.2 仕事
このとき仕事 $W$ は
\[
{\rm (1.6.2)}
W = F \cdot x
\]
のように,網掛けで囲まれた面積と一致する.図1.6.3 のようにばねのなす仕事は力と変形がばね定数 $k$ に比例する.
$\hspace{5em}$図1.6.3 ばねの仕事
したがって,以下のように求めることができる.
\[
{\rm (1.6.3)}
W = \frac{1}{2} k x^2
\]
以上のように仕事はどのような力の作用のもとにどれくらいの変形をするかといったことであるため,時間の概念が取り入れられていなかった.しかし,単位時間にどれくらいの仕事をするかということを知っておくことも重要なことである.このような物理量を示すものとして仕事率 (power)がある.仕事率は以下のように表される.
\[
{\rm (1.6.4)}
P = \frac{W}{t}
= \boldsymbol{F}\frac{ \Delta \boldsymbol{S}}{\Delta t}
= \boldsymbol{F} \cdot \boldsymbol{v}
\]
ここで,$\Delta \boldsymbol{S}$ は外力 $\boldsymbol{F}$ の作用により $\Delta t$ 時間に移動した変位である.仕事率の単位は,工学単位系の場合 $( {\rm kgf・cm/sec} )$ などが,またSI単位系ではワット $({\rm W})$が用いられる.特に,1時間あたりの仕事率の場合にはキロワット時 $({\rm kWh})$ が用いられる.
1.6.2 位置エネルギー
$\hspace{0em}$図1.6.4 位置のエネルギー
このとき,物体には重力加速度 $g$ が作用するため,運動の法則から物体には以下の力が作用する.
\[
{\rm (1.6.5)}
F = mg
\]
物体は高さ $h$ から落下するからその移動量は $h$ であり,物体に対する重力のなした仕事は
\[
{\rm (1.6.6)}
T = F \cdot h = mgh
\]
である.このような仕事を重力場における位置エネルギー (potential energy)という.
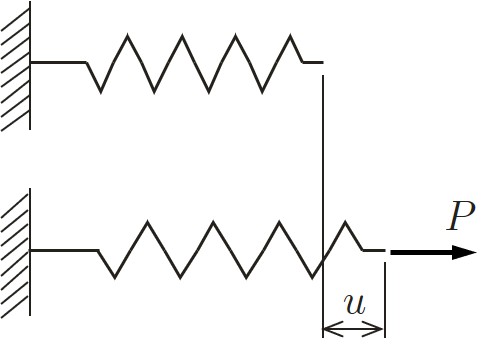
$\hspace{0em}$図1.6.5 弾性場の位置エネルギー
次に,図1.6.5 に示すよう,ばね定数 $k$ のばねを力 $P$ で引っ張った状態を考えてみよう.このとき,ばねの伸びが $u$ であるとすると,$u$ が0になるまでにばねがする仕事は以下のようになる.
\[
{\rm (1.6.7)}
W = \frac{1}{2} ku^2
\]
これもまた,位置エネルギーの一つで弾性場における位置エネルギー といわれている.基準点から考えている点まで物体を運ぶために必要な力 」と考えることができる.位置エネルギーを潜在的に所持しているエネルギーという意味からポテンシャル・エネルギー ともいう.位置エネルギーは起点と終点の位置のみにより決まるため,物体を運ぶ道筋には無関係である.
1.6.3 運動エネルギー
\[
{\rm (1.6.8)}
d \boldsymbol{r} = \boldsymbol{v} dt
\]
で表される.いま,運動の方程式
\[
{\rm (1.6.9)}
\boldsymbol{F} = m \boldsymbol{\alpha}
= m \frac{d \boldsymbol{v}}{dt}
\]
を用いると,$\Delta t$ 時間においてなす仕事は以下のようになる.
\[
{\rm (1.6.10)}
\boldsymbol{F} d \boldsymbol{r}
= m \frac{d \boldsymbol{v}}{dt} \boldsymbol{v} \cdot dt
= \frac{1}{2} m v^2
\]
速度が $\boldsymbol{v}_1$ から $\boldsymbol{v}_1$ になるまでに力のする仕事は
\[
{\rm (1.6.11)}
\int_A^B F dr
= \left[ \frac{1}{2} mv^2 \right ]_{v_1}^{v_2}
= \frac{1}{2}mv_2^2 - \frac{1}{2}mv_1^2
\]
であるから,静止状態から速度 $\boldsymbol{v}$ になるまでになす仕事は $\boldsymbol{v}_1=0$,$\boldsymbol{v}_2=0$ として以下のように表すことができる.
\[
{\rm (1.6.12)}
K = \frac{1}{2} mv^2
\]
これは,最後の速度だけに関係する運動の量で,途中の力とは無関係である.このような物理量を運動エネルギー (kinetic energy)と呼んでいる.運動エネルギー (kinetic energy)と呼んでいる.仕事を成し得る能力 」という意味を持っており,運動のエネルギーについて考えてみれば,例えば,速度 $v$ で走っている自動車を止めるには $mv^2/2$ の仕事が必要であるということである.
\[
{\rm (1.6.13)}
mv - mv_0 = Ft
\]
なる関係が得られる.この間の物体の移動量 $x$ は
\[
{\rm (1.6.14)}
x = \frac{1}{2} ( v + v_0 ) t
\]
であるから,式(1.6.12) ,式(1.6.14) より以下の関係が得られる.
\[
{\rm (1.6.15)}
\frac{1}{2} mv^2 - \frac{1}{2}mv_0^2 = Fx = W
\]
この式は物体に与えた仕事 $W$ だけ運動エネルギーが変化することを示しており,エネルギーの原理 とも呼ばれている.式(1.6.11) が一般的な式である.
1.6.4 力学的エネルギー保存の法則
\[
{\rm (1.6.16)}
E = K + T
\]
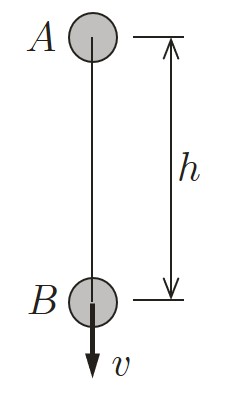
を力学的エネルギー (mechanical energy) という.保存力の場 (conservative force field)という.さらに簡単に述べるなら,位置エネルギーが存在できるような場のことである.摩擦などがあると,途中でエネルギーの損失があるためどのような経路をたどったが重要となり,保存力の場とはならない.保存力の場のもとに運動する物体のエネルギーは一定であり,これを力学的エネルギー保存の法則 という.図1.6.6 に示すような高さ $h$ から自然落下する質量 $m$ の物体の運動を考えてみよう.
$\hspace{0em}$図1.6.6 自由落下
$B$ 点を考えれば,物体は $A$ 点で位置のエネルギー $mgh$ を持っている.また,$A$ 点では速度が0であるため,運動エネルギーは無い.物体が $B$ 点まで落下すると位置のエネルギーは0となり,$mv2/2$ の運動エネルギーが生ずる.力学的エネルギー保存の法則より,$A$ 点での力学的エネルギーと $B$ 点での力学的エネルギーは等しいため以下の関係が得られる.
\[
{\rm (1.6.17)}
mgh = \frac{1}{2} mv^2
\]
このことから,高さ $h$ から質量 $m$ の物体を落下させると $B$ 点での物体の落下速度が以下のように求められる.
\[
{\rm (1.6.18)}
v = \sqrt{2gh}
\]
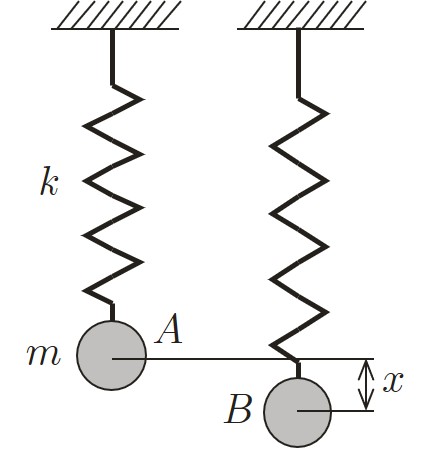
質量 $m$ の物体がばねにつり下げられた場合について考えてみよう.物体をばねにつり下げた時点では図1.6.7 のように降下点 $B$ を基準として位置のエネルギー $mgh$ を持っている.
$\hspace{0em}$図1.6.7 ばねのエネルギー
もちろん,つり下げた時点での速度は0であるため,運動エネルギーはない.一方,降下点 $B$ でも速度は0であるため,運動エネルギーは生じないが,ばねが $x$ だけ伸びるため,弾性力による位置のエネルギー $kx2/2$ が生ずる.両者の間でエネルギーは保存されるから
\[
{\rm (1.6.19)}
mgx = \frac{1}{kx^2}
\]
なる関係が得られ,結局
\[
{\rm (1.6.20)}
x = \frac{2mg}{k}
\]
といった降下を行う.静力学において,つり合い状態にあるばねの変形量は
\[
{\rm (1.6.21)}
mg = kx \hspace{2em} \therefore \;\; x = \frac{mg}{k}
\]
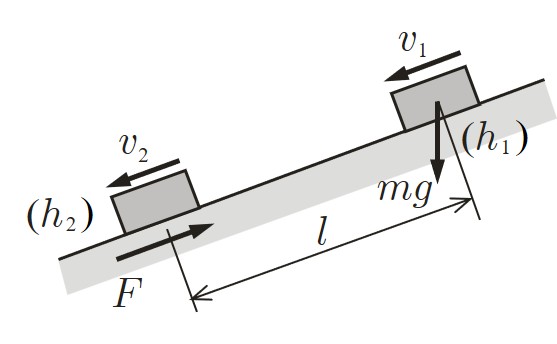
であるから,式(1.6.20) の状態でばねに復元力が働き,その結果ばねに振動が発生する.図1.6.8 は高さ $h_1$ で $v_1$ の速さの質量 $m$ の物体が.運動後,高さ $h_2$ で速さ $v_2$ になったとする図である..
$\hspace{3em}$図1.6.8 摩擦による仕事
このとき,もし,摩擦が無ければ以下の関係が成立する.
\[
{\rm (1.6.22)}
\frac{1}{2} mv_1^2 + mgh_1 = \frac{1}{2}mv_2^2 + mgh_2
\]
しかし,摩擦があるとすべる方向と逆向きに摩擦に関する力 $F$ が作用するため,式(1.6.22) は以下のようになる.
\[
{\rm (1.6.23)}
\left( \frac{1}{2} mv_1^2 + mgh_1 \right)
- \left( \frac{1}{2} mv_2^2 + mgh_2 \right)
= Fl
\]
すなわち,最初と最後の力学的エネルギーの差が摩擦による仕事となる.
\[
{\rm (1.6.24)}
v = v_1 + v_2
\]
ここで $v_1$,$v_2$ は衝突後の物体 $A$,$B$ の速度である.一方,はねかえり係数を $e$ とすると
\[
{\rm (1.6.25)}
v_1 - v_2 = -ev
\]
であり,式(1.6.24) と式(1.6.25) より速度 $v_1$,$v_2$ は以下のようになる.
\[
{\rm (1.6.26)}
\left.
\begin{array}{rcl}
v_1 &=& \displaystyle \frac{1}{2} (1-e)v \\
v_2 &=& \displaystyle \frac{1}{2} (1+e)v
\end{array}
\right\}
\]
当初の運動エネルギーと衝突後の運動エネルギーの差は式(1.6.26) より
\[
{\rm (1.6.27)}
\frac{1}{2} mv^2 - \left( \frac{1}{2}mv_1^2 + \frac{1}{2}mv_2^2\right)
=
\frac{1}{4}mv^2(1-e^2)
\]
である.式(1.6.27) の右辺が0であればエネルギーは保存されていると考えることができる.弾性衝突の場合,$e = 1$ であるから右辺が0となり,エネルギーが保存される.しかし,非弾性衝突の場合,$e \lt 1$ であるため,衝突により別なエネルギーが発生し力学的エネルギーは保存されなくなる.